ในโพสต์นี้เราจะตรวจสอบข้อกำหนดทางเทคนิคและรายละเอียดที่ชัดเจนของ IC L293 ซึ่งเป็นไอซีไดรเวอร์ Quad half-H อเนกประสงค์และสามารถใช้สำหรับการติดตั้งมอเตอร์ที่น่าสนใจมากมาย วงจรตามไดรเวอร์ การใช้งานเช่นสำหรับมอเตอร์ที่ใช้งานโซลีนอยด์และโหลดอุปนัยอื่น ๆ (4 หน่วยแยกกันหรือเป็นคู่ผ่านโหมดผลักดึง)
มันทำงานอย่างไร
IC L293 โดยทั่วไปมีเอาต์พุตสองคู่ซึ่งสามารถใช้งานได้อย่างอิสระสำหรับการทำงานสองโหลดแยกกันในโหมด push pull หรือในลักษณะสองทิศทางหรือเรียกอีกอย่างว่าโหมดเสาโทเท็มหรืออีกทางเลือกหนึ่งของคู่ของเอาต์พุตคู่นี้สามารถแยกกันได้ ใช้สำหรับการทำงาน 4 โหลดแต่ละตัวในลักษณะทิศทางเดียว
การทำงานข้างต้นของโหลดจะถูกควบคุมผ่านพินเอาต์อินพุตที่สอดคล้องกันซึ่งเรียกใช้จากวงจรออสซิลเลเตอร์ภายนอกหรือ a แหล่ง PWM .
ตัวอย่างเช่นหากจำเป็นต้องดำเนินการโหลดในลักษณะเสาโทเทมอินพุตที่สอดคล้องกันของสองขั้นตอนไดรเวอร์ของ IC อาจถูกทริกเกอร์จากภายนอก ออสซิลเลเตอร์เช่นผ่านประตู NAND สองประตู ซึ่งประตูหนึ่งสามารถต่อสายเป็นออสซิลเลเตอร์ในขณะที่อีกประตูหนึ่งเป็นอินเวอร์เตอร์
สัญญาณต่อต้านเฟสทั้งสองจากสิ่งเหล่านี้ ประตู NAND จากนั้นสามารถเชื่อมต่อกับอินพุตของ L293 เพื่อใช้งานเอาต์พุตที่เกี่ยวข้องในลักษณะเสาโทเท็ม (แบบกด - ดึง) ซึ่งจะเรียกใช้โหลดที่เชื่อมต่อในลักษณะเดียวกัน
การกำหนด Pinouts ของ IC L293
ตอนนี้เรามาเรียนรู้ฟังก์ชัน pinout ของ IC L293 โดยอ้างอิงจากแผนภาพต่อไปนี้และจากคำอธิบายต่อไปนี้:

Pin # 2 คืออินพุตควบคุมซึ่งควบคุมขาเอาต์พุต # 3
ในทำนองเดียวกันพิน # 7 เป็นอินพุตควบคุมสำหรับขาเอาต์พุต # 6
Pin # 1 ใช้สำหรับเปิดหรือปิดชุดพินด้านบน ค่าบวกที่พิน # 1 ช่วยให้ชุดพินเอาต์ข้างต้นเปิดใช้งานและใช้งานได้ในขณะที่แหล่งจ่ายไฟลบหรือ 0V จะปิดใช้งานทันที
ค่อนข้างเหมือนกันพิน # 15 และพิน # 10 กลายเป็นอินพุตควบคุมสำหรับเอาต์พุตพิน # 14 และพิน # 11 ที่ตรงกันและสิ่งเหล่านี้จะยังคงใช้งานได้ตราบเท่าที่พิน # 9 อยู่ที่ลอจิกบวกและจะปิดใช้งานเมื่อตรรกะ 0V เป็น ใช้กับ pinout นี้
ตามที่อธิบายไว้ก่อนหน้านี้พิน # 3 และพิน # 6 สามารถใช้เป็นคู่เสาโทเท็มได้โดยป้อนสัญญาณลอจิกต่อต้านเฟสที่ขาอินพุต # 7 และพิน # 2 ความหมายเมื่อพิน # 2 ถูกป้อนด้วยตรรกะเชิงบวกพิน # 7 จะต้องอยู่ที่ตรรกะเชิงลบและในทางกลับกัน
สิ่งนี้จะช่วยให้ขาเอาต์พุต # 6 และขา # 3 สามารถใช้งานโหลดที่เชื่อมต่อในทิศทางที่สอดคล้องกันและในทางกลับกันเมื่อสัญญาณลอจิกอินพุตกลับด้านขั้วโหลดจะกลับด้านเช่นกันและจะเริ่มหมุนในทิศทางตรงกันข้าม
หากลำดับนี้ถูกสลับอย่างรวดเร็วโหลดจะทำงานตามกันในลักษณะสลับไปมาหรือในลักษณะผลักดัน
การดำเนินการข้างต้นสามารถจำลองข้ามคู่ไดรเวอร์อีกด้านหนึ่งได้เช่นกัน
Vcc หรืออินพุตบวกของแหล่งจ่ายสำหรับ IC ได้รับการกำหนดค่าอย่างอิสระสำหรับอินพุตแหล่งจ่ายที่แตกต่างกันสองอินพุต
Pin # 16, (Vcc1) ใช้สำหรับการใช้งานพินที่เปิดใช้งานและสำหรับการใช้งานขั้นตอนลอจิกภายในอื่น ๆ ของ IC และสามารถให้อินพุต 5V ได้แม้ว่าข้อ จำกัด สูงสุดคือ 36V
Pin # 8, (Vcc2) ใช้สำหรับเปิดเครื่องมอเตอร์โดยเฉพาะและสามารถป้อนได้ตั้งแต่ 4.5V ถึง 36V
ข้อกำหนดทางไฟฟ้าของ IC L293
IC L293 ได้รับการออกแบบมาเพื่อทำงานกับแหล่งจ่ายใด ๆ ระหว่าง 4.5V ถึง 36V โดยมีข้อกำหนดการจัดการกระแสไฟฟ้าสูงสุดไม่เกิน 1 แอมป์ (2 แอมป์ในโหมดพัลส์สูงสุด 5ms)
ดังนั้นโหลดใด ๆ ที่อยู่ในข้อกำหนดที่กล่าวถึงข้างต้นสามารถใช้งานได้กับเอาต์พุตที่กล่าวถึงของ IC L293
ตรรกะการควบคุมอินพุตไม่ควรเกิน 7V ไม่ว่าจะเป็นแหล่งจ่ายต่อเนื่องหรือแหล่งจ่าย PWM
ใช้ L293 IC สำหรับแอปพลิเคชันควบคุมมอเตอร์
ตอนนี้เรามาเรียนรู้วิธีการใช้วงจรควบคุมมอเตอร์โดยใช้ IC L293 ผ่านโหมดการทำงานที่แตกต่างกันและโดยใช้มอเตอร์มากถึง 4 ตัวพร้อมอุปกรณ์ควบคุมแยกกัน
ในโพสต์ก่อนหน้านี้เราได้ศึกษารายละเอียดพินเอาต์และการทำงานของ IC L293 ที่นี่เราเรียนรู้ว่า IC เดียวกันสามารถใช้ควบคุมมอเตอร์ผ่านโหมดและการกำหนดค่าเฉพาะได้อย่างไร
โหมดควบคุม
IC L293 สามารถใช้สำหรับควบคุมมอเตอร์ในโหมดต่อไปนี้:
1) มอเตอร์ 4 ตัวผ่านอินพุต PWM อิสระ
2) มอเตอร์ 2 ตัวในโหมดเสาสองทิศทางหรือเสาโทเท็มพร้อมการควบคุมความเร็วผ่าน PWM
3) มอเตอร์ BLDC 2 เฟสหนึ่งตัวที่ใช้อินพุต PWM
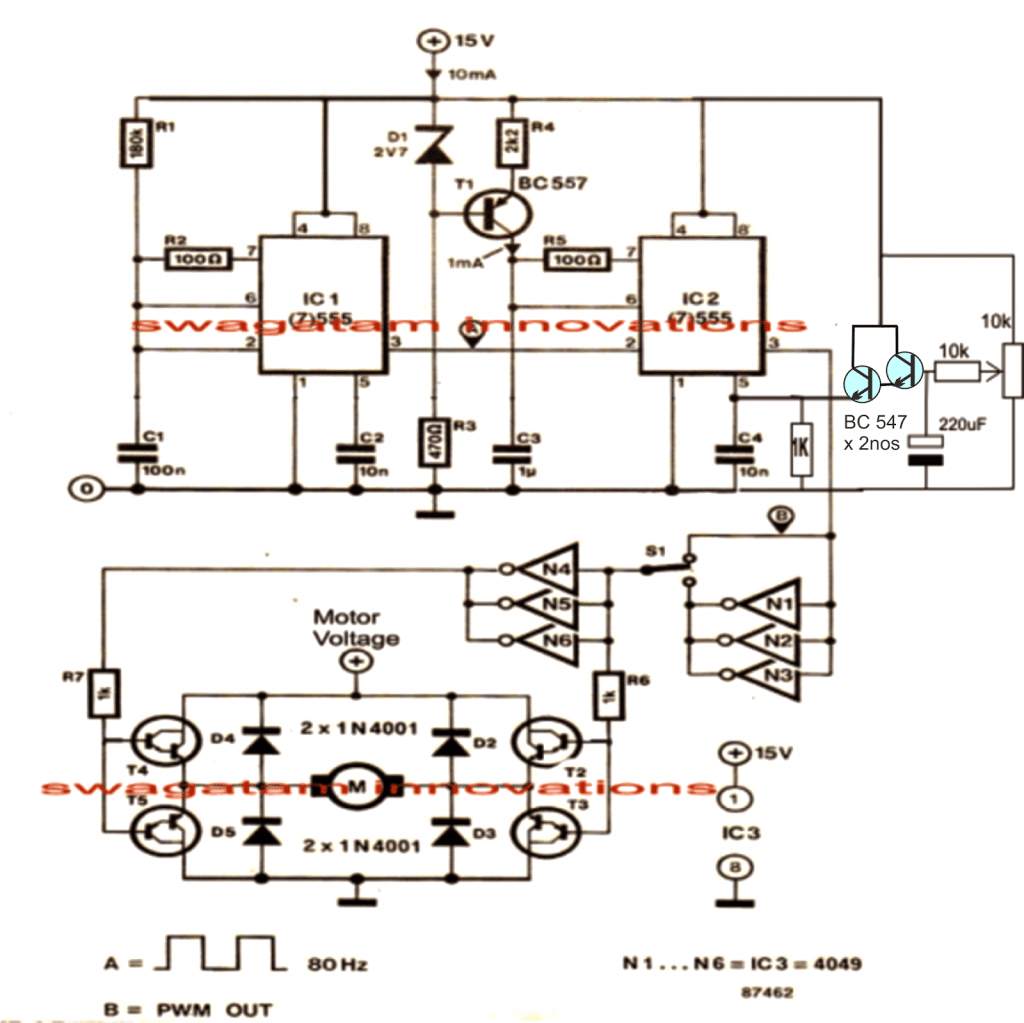
ภาพด้านล่างแสดงให้เห็นว่า IC สามารถใช้ในการควบคุมมอเตอร์ที่มีการควบคุมอิสระได้อย่างไรและจะใช้มอเตอร์ตัวเดียวเพื่อให้ได้ การควบคุมแบบสองทิศทาง :

ด้านซ้ายของ IC แสดงมอเตอร์ที่กำหนดค่าให้ทำงานในโหมดสองทิศทาง เพื่อให้แน่ใจว่ามอเตอร์หมุนไปในทิศทางใดทิศทางหนึ่งที่เลือกต้องใช้พิน # 1 และพิน # 7 กับอินพุต DC 5V ป้องกันเฟส ในการเปลี่ยนทิศทางของการหมุนของมอเตอร์ขั้ว 5V นี้สามารถเปลี่ยนได้ในพินอินพุตที่กล่าวถึง
Pin # 1 ต้องถือไว้ที่ลอจิกสูงเพื่อให้มอเตอร์และการทำงานของ IC เปิดใช้งานตรรกะ 0 ที่นี่จะหยุดมอเตอร์ทันที
แหล่งจ่ายที่พินเอาต์อินพุตควบคุมอาจอยู่ในรูปแบบของ PWM ซึ่งสามารถใช้เพิ่มเติมได้ ควบคุมความเร็วของมอเตอร์ จาก 0 ถึงสูงสุดเพียงแค่เปลี่ยนรอบการทำงานของ PWM
ด้านขวาของ IC แสดงถึงการจัดเรียงซึ่งมอเตอร์สองตัวถูกควบคุมอย่างอิสระผ่านอินพุต PWM อิสระที่ขาตามลำดับ # 15 และพิน # 10
พิน # 9 ต้องถือไว้ที่ลอจิกสูงเพื่อให้มอเตอร์และ IC ทำงาน ศูนย์ลอจิกที่พินเอาต์นี้จะหยุดและปิดการทำงานของมอเตอร์ที่ต่ออยู่ทันที
เนื่องจากส่วนด้านซ้ายและด้านขวาของ IC เหมือนกันกับรายละเอียดการทำงานของพินเอาต์จึงสามารถสลับการจัดเรียงที่แสดงของมอเตอร์ผ่านพินเอาต์ที่เกี่ยวข้องเพื่อให้ได้การทำงานที่เหมือนกันตามที่อธิบายไว้ข้างต้นซึ่งหมายความว่าสามารถเชื่อมต่อมอเตอร์สองตัวที่ ด้านซ้ายของ IC เหมือนกับที่ใช้ที่ด้านขวาของ IC ในแผนภาพ
ในทำนองเดียวกันระบบสองทิศทางสามารถรวมเข้ากับด้านขวาของ IC pinouts ได้เหมือนกับที่ทำได้ที่ด้านซ้ายของ IC ในแผนภาพที่แสดงด้านบน
ตัวอย่างข้างต้นแสดงให้เห็นว่า IC L293 สามารถใช้ควบคุมมอเตอร์ 4 ตัวแยกกันได้อย่างไรหรือ 2 มอเตอร์ในโหมดสองทิศทางและวิธีควบคุมความเร็วโดยใช้ฟีด PWM ที่พินอินพุตที่เกี่ยวข้องของ IC
ใช้ L293 เพื่อควบคุมมอเตอร์ BLDC 2 เฟส

ในภาพด้านบนเราจะเห็นว่า IC L293 สามารถกำหนดค่าให้ควบคุมมอเตอร์ BLDC 2 เฟสได้อย่างไรโดยใช้พินเอาต์ที่ระบุและผ่านอินพุตควบคุมสองตัวที่แสดงเป็นตัวควบคุม A และตัวควบคุม B
สามารถมองเห็นมอเตอร์ 2 เฟสตัวเดียวที่เชื่อมต่อผ่านเอาต์พุตของ IC ในขณะที่อินพุตเชื่อมต่อกับชุดประตูไม่ซึ่งมีหน้าที่ในการสร้างตรรกะอินพุตป้องกันเฟสที่จำเป็นสำหรับการควบคุมมอเตอร์
จุดควบคุม A และจุดควบคุม B อาจอยู่ภายใต้ตรรกะแบบสลับเพื่อให้มอเตอร์ 2 เฟสหมุนได้อย่างถูกต้อง
ขั้วของลอจิกแบบสลับจะกำหนดทิศทางการหมุนของมอเตอร์
เพื่อให้ได้การควบคุมความเร็วเชิงเส้นของมอเตอร์สามารถใช้รูปแบบลอจิก PWM กับอินพุตควบคุม A และควบคุม B และรอบการทำงานอาจแตกต่างกันเพื่อให้ได้การควบคุมความเร็วที่ต้องการบนมอเตอร์ที่เชื่อมต่อ
หากคุณมีข้อสงสัยเพิ่มเติมเกี่ยวกับข้อกำหนดทางเทคนิคหรือแผ่นข้อมูลหรือรายละเอียดที่ชัดเจนของ IC คุณสามารถแสดงความคิดเห็นด้านล่างเพื่อตอบกลับได้ทันที
คู่ของ: เทอร์โมมิเตอร์ไร้สายโดยใช้ RF Link 433 MHz โดยใช้ Arduino ถัดไป: วงจร ESC สากลสำหรับมอเตอร์ BLDC และอัลเทอร์เนเตอร์