ในโพสต์นี้เราจะตรวจสอบว่ามอเตอร์ BLDC คืออะไรและจากนั้นเราจะเรียนรู้เกี่ยวกับการออกแบบวงจรขับมอเตอร์ BLDC แบบไม่มีเซ็นเซอร์
พัดลม CPU BLDC
เห็นพัดลมที่เคลื่อนที่เร็วเหล่านี้ในซีพียูตัวปรับแรงดันไฟฟ้าเครื่องเล่นดีวีดีและอุปกรณ์อื่น ๆ ที่คล้ายคลึงกันซึ่งทำงานได้อย่างมีประสิทธิภาพสูงสุดใช้พื้นที่น้อยที่สุดในปัจจุบันและยังสามารถส่งมอบการดำเนินงานที่สำคัญตามที่กำหนดไว้สำหรับอุปกรณ์เฉพาะ?
ใช่นี่คือพัดลม BLDC รุ่นใหม่ทั้งหมดหรือมอเตอร์กระแสตรงไร้แปรงถ่านซึ่งดีกว่ามอเตอร์แบบแปรงถ่านแบบเก่ามาก

เอื้อเฟื้อภาพ: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
อย่างไรก็ตามมอเตอร์ BLDC จะต้องใช้วงจรไดรเวอร์ที่ซับซ้อนและใช่พัดลม CPU เหล่านี้ทั้งหมดมีโมดูลไดรเวอร์เหล่านี้อยู่ในตัวแม้ว่าจะดูเหมือนทำงานได้ง่ายโดยใช้ DC ธรรมดา แต่ระบบจะติดตั้งวงจรอัจฉริยะไว้ภายในแล้ว
ไดรเวอร์มอเตอร์ BLDC
ที่นี่เราจะได้เรียนรู้เกี่ยวกับวงจรขับมอเตอร์ BLDC ที่ชาญฉลาดโดยใช้ชิปตัวเดียว DRV10963 สำหรับการขับเคลื่อนมอเตอร์ BLDC ขนาดเล็กที่มีประสิทธิภาพที่น่าทึ่งและต่อไปในบทความที่กำลังจะมาถึงเราจะดูว่าวงจร IC นี้สามารถอัพเกรดได้อย่างไรสำหรับการขับขี่ BLDC กระแสสูงที่ทรงพลังเช่นตัวที่เป็น ใช้ใน quadcopters
แต่ก่อนหน้านี้น่าสนใจที่จะเรียนรู้เกี่ยวกับมอเตอร์ BLDC
ความแตกต่างระหว่างมอเตอร์กระแสตรงแบบแปรงและไร้แปรงถ่าน
ความแตกต่างระหว่างมอเตอร์แบบแปรงและมอเตอร์ไร้แปรงถ่านและอัตราประสิทธิภาพค่อนข้างชัดเจน
เนื่องจากมอเตอร์แบบแปรงมีส่วนกระดองที่เคลื่อนที่ระหว่างแม่เหล็กจึงต้องใช้ 'แปรง' (หน้าสัมผัสถู) เพื่อให้ขั้วขดลวดเคลื่อนที่สามารถรับแรงดันไฟฟ้าได้อย่างสม่ำเสมอโดยไม่ต้องไปถึงแหล่งจ่ายเองซึ่งจะทำให้ ทำงานไม่ได้และเป็นอันตรายต่อการปฏิบัติงาน
ในมอเตอร์แบบไม่มีแปรงขดลวดหรือขดลวดจะไม่เคลื่อนที่และมีค่าคงที่ที่นี่โรเตอร์มีแม่เหล็กถาวรชุดหนึ่งและหมุนตามอิทธิพลของฟลักซ์แม่เหล็กของขดลวดโดยรอบ
เนื่องจากแม่เหล็กปราศจากความยุ่งยากและสามารถทำงานได้โดยไม่ต้องใช้ขั้วเพื่อจัดการหรือรับพลังงานจึงสามารถหมุนได้อย่างง่ายดายหมุนด้วยความเร็วที่รวดเร็วและแทบจะไม่มีเสียงรบกวน
แต่มีการจับที่นี่ ในการที่จะทำให้แม่เหล็กไฟฟ้าตอบสนองต่อฟลักซ์ของแม่เหล็กถาวรจำเป็นต้องมีการเปลี่ยนเฟสหรือขั้วแม่เหล็กอย่างต่อเนื่องเพื่อให้ทั้งสองคู่สามารถตอบสนองได้ตลอดเวลาและผ่านแรงตรงข้ามซึ่งจะปล่อยแรงบิดที่ต้องการในช่วง โรเตอร์และดำเนินการหมุนด้วยแรงบิดที่เป็นผลลัพธ์
ในมอเตอร์แบบแปรงมันจะง่ายขึ้นเนื่องจากลักษณะการปรับตัวเองของขดลวดกระดองซึ่งสามารถหมุนและสร้างแรงแม่เหล็กของฝ่ายตรงข้ามได้ด้วยตัวเองและหมุนไปเรื่อย ๆ โดยไม่ต้องใช้พัลส์ภายนอกหรือการประมวลผลใด ๆ
อย่างไรก็ตามใน BLDC สิ่งนี้จะกลายเป็นปัญหาเนื่องจากโรเตอร์แม่เหล็กยังคง 'ไร้เงื่อนงำ' และต้องใช้คำสั่งแม่เหล็กที่คำนวณได้จากขดลวดเพื่อที่จะหมุนอย่างมีความหมายและไม่ใช่ในลักษณะจับจด
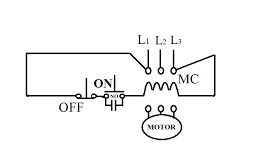
นั่นเป็นเหตุผลที่ว่าทำไมมอเตอร์ BLDC ทั้งหมดจึงจำเป็นต้องมีวงจรขับมอเตอร์เพื่อควบคุมชุดขดลวดที่แตกต่างกันสามชุดภายในมอเตอร์
ดังนั้น BLDC ทั้งหมดจึงเป็นมอเตอร์ 3 เฟสเป็นหลักและต้องใช้ 3 เฟสในการผลิตแรงบิดในการหมุนของโรเตอร์
ไดรเวอร์ BLDC ไร้เซ็นเซอร์ทำอะไร
วงจรขับ BLDC ที่น้อยกว่าเซ็นเซอร์เพียงแค่หมุนขดลวด 3 ชุดในลักษณะตามลำดับเพื่อให้โรเตอร์แม่เหล็กสามารถผ่านแรงต่อต้านที่สม่ำเสมอทำให้มอเตอร์สามารถสร้างแรงบิดและแรงหมุนได้อย่างต่อเนื่อง
แต่การเปิดใช้งานตามลำดับของ BLDC ที่คดเคี้ยวโดยวงจรไม่สามารถตั้งค่าแบบสุ่มได้ต้องเป็นแบบควบคู่หรือตอบสนองต่อตำแหน่งการหมุนของแม่เหล็กโรเตอร์มิฉะนั้นการใช้งานอาจเป็นไปอย่างยุ่งเหยิงและเราอาจพบเห็นเพลามอเตอร์ (โรเตอร์ ) หมุนไปตามยถากรรมซึ่งกำลังกระตุกระหว่างตามเข็มนาฬิกาและทวนเข็มนาฬิกาโดยไม่มีการหมุนที่เหมาะสม
เหตุใดจึงใช้เซนเซอร์ในมอเตอร์ BLDC
ดังนั้นเราจึงแนะนำเซ็นเซอร์ที่อยู่ภายในมอเตอร์ BLDC หลายรุ่นซึ่งเซ็นเซอร์เหล่านี้ (โดยทั่วไปคือเซ็นเซอร์ Hall effect) 'เข้าใจ' ตำแหน่งที่เปลี่ยนไปของขั้วแม่เหล็กของแม่เหล็กโรเตอร์สั่งให้วงจรโปรเซสเซอร์ที่ต่ออยู่ทำให้เกิดกระแสไฟฟ้าตามขดลวดที่เกี่ยวข้องและดำเนินการเคลื่อนที่แบบหมุน ด้วยแรงบิดที่เหมาะสมที่สุด
เซ็นเซอร์ฮอลล์เอฟเฟกต์ถูกใช้อย่างมีประสิทธิภาพในมอเตอร์ BLDC ส่วนใหญ่ซึ่งมีขนาดค่อนข้างใหญ่กว่า แต่สำหรับมอเตอร์ขนาดเล็กเช่นในพัดลมซีพียูไดรฟ์ซีพียูเครื่องเล่นดีวีดีในพัดลมดูดอากาศขนาดเล็กสำหรับมอเตอร์ที่ใช้ในควอดคอปเตอร์เซ็นเซอร์เอฟเฟกต์ฮอลล์อาจไม่เหมาะสม ดังนั้นจึงมีการนำเซ็นเซอร์ทางเลือกมาใช้น้อยลง
สิ่งนี้เกี่ยวข้องกับการใช้ประโยชน์จากกระแสไฟฟ้า EMF ย้อนกลับโดยธรรมชาติของขดลวดซึ่งใช้เป็นแหล่งอ้างอิงสำหรับการประมวลผลและทำให้เกิดไฟฟ้าชุดขดลวดที่เกี่ยวข้องและเรียกใช้แรงบิดในการหมุน

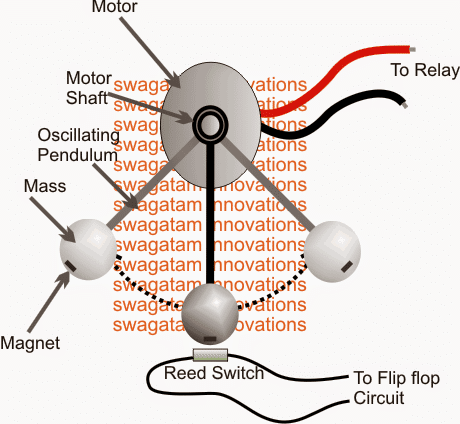
จำลองการเคลื่อนไหวของโรเตอร์ BLDC
ในการจำลองน้ำมันดิบข้างต้นเราสามารถเห็นภาพว่า EMF ที่ปล่อยกลับมาถูกนำมาใช้เป็นข้อมูลอ้างอิงได้อย่างไรและใช้ในการผลิตพัลส์การเรียงลำดับสำหรับชุดขดลวดที่ตามมาโดยกำหนดแรงบิดหมุนบนโรเตอร์แม่เหล็กถาวรกลาง การจำลองอาจไม่ใช่การจำลองแบบที่แน่นอน แต่ให้หลักการทำงานคร่าวๆ
เป็นที่น่าสนใจที่จะทราบว่าพัลส์จะเปลี่ยนเมื่อ N / S ของแม่เหล็กอยู่ตรงกลางแกนคดเคี้ยวซึ่งทำให้ขดลวดสามารถรวมพลังงานเป็น N หรือ S ขึ้นอยู่กับขั้วของพัลส์และสร้างการดึงดูดและการขับไล่ บังคับกับแม่เหล็ก N / S ซึ่งจะสร้างแรงบิดที่ต้องการในระดับสูงสุดที่เป็นไปได้
และสิ่งนี้จะเป็นไปได้เนื่องจาก EMF ด้านหลังปล่อยออกมาผ่านการเปลี่ยนขดลวดก่อนหน้านี้
การสนทนาข้างต้นชี้แจงการทำงานของเซ็นเซอร์มอเตอร์ BLDC น้อยลงตอนนี้เรามาเรียนรู้กันว่าวงจรที่ระบุจัดการการทำงานที่ซับซ้อนข้างต้นของการสลับ 3 เฟสอย่างไร
ไดรเวอร์ BLDC DRV10963
หลังจาก Googling บางส่วนฉันพบวงจรไดรเวอร์ BLDC แบบไร้เซ็นเซอร์นี้โดยใช้ชิปตัวเดียว DRV10963 ซึ่งใช้ชิ้นส่วนจำนวนเล็กน้อยในการกำหนดค่าและยังสามารถใช้การประมวลผลที่ซับซ้อนสำหรับการกระทำที่ต้องการได้
DRV10963 เป็นชิปที่ล้ำสมัยซึ่งได้รับการออกแบบมาโดยเฉพาะเพื่อให้ใช้งานมอเตอร์ BLDC ของเซ็นเซอร์น้อยลงโดยคาดว่า EMF ด้านหลังจากขดลวดของมอเตอร์และส่งคำสั่งที่แม่นยำในการไขลานและให้แรงบิดในการหมุนที่เหมาะสมที่สุดเหนือโรเตอร์
แผนภูมิวงจรรวม

ภาพด้านบนแสดงโครงร่างอย่างง่ายของวงจรซึ่งดูเหมือนจะไม่มีอะไรเลยนอกจากตัว IC
พินต่างๆได้รับการจัดสรรเพื่อดำเนินการตามฟังก์ชันที่ระบุเช่นการควบคุมความเร็ว PWM ของมอเตอร์การควบคุมทิศทาง ฯลฯ โดยเพียงแค่ป้อนพินเอาต์ที่เกี่ยวข้องกับข้อมูลที่ระบุจากแหล่งภายนอก
ภาพต่อไปนี้แสดงแพ็กเกจของชิปซึ่งมีลักษณะเหมือน DIL IC 10 พินฟังก์ชันพินต่างๆที่เหมือนกันอาจศึกษาได้จากข้อมูลที่ตกแต่งไว้ในแผนภาพ:

อ้างถึงแผนภาพวงจรของวงจรขับ BLDC แบบไม่เซ็นเซอร์ที่เสนอ ตามที่นำเสนอในบทความก่อนหน้านี้และภาพชิปด้านบนรายละเอียด pinouts อาจเข้าใจได้ดังนี้:
รายละเอียด IC Pinout
FG = เป็นพินตัวบ่งชี้ความเร็วมอเตอร์ (เอาต์พุต) ซึ่งติดตั้งอยู่ในโหมด open Collector พร้อม BJT ภายใน
Open Collector หมายความว่าเอาต์พุตที่พินเอาต์นี้จะสร้าง PWM เชิงลบโดยใช้ลอจิกที่จมผ่านตัวรวบรวมแบบเปิดและกราวด์ดังนั้นเพื่อให้ได้การอ่านที่ถูกต้องผู้ใช้จะต้องเชื่อมต่อตัวต้านทานแบบดึงขึ้นระหว่างตัวสะสมแบบเปิดและอุปทานบวก (5V ) เพื่อให้บรรลุการแสดงความเร็วที่พินนี้
FGS = เป็นอินพุตตัวเลือกตัวบ่งชี้ความเร็วซึ่งหมายความว่าอาจมีการนำตรรกะสูงหรือต่ำมาใช้ที่นี่เพื่อเปิด / ปิดพินตัวบ่งชี้ FG
Vcc = การจ่ายไฟบวกให้กับ IC เพื่อให้สามารถใช้งานได้ต้องไม่เกิน 5V
W, U และ V เป็นเอาต์พุต 3 เฟสสำหรับมอเตอร์ BLDC ซึ่งควรจะทำงานผ่าน IC นี้ นอกจากนี้ยังทำหน้าที่เหมือนอินพุตสำหรับตรวจจับพัลส์ EMF ของมอเตอร์สำหรับการสลับขดลวดมอเตอร์แบบซิงโครไนซ์ที่จำเป็น
GND = หมายถึงพินแหล่งจ่ายเชิงลบของ IC เทียบกับพิน Vdd
FR = ช่วยในการเลือกหรือสั่งการทิศทางของมอเตอร์และอาจมีการเปลี่ยนแปลงแบบไดนามิกได้ตลอดเวลาเมื่อระบบขับเคลื่อนเพียงแค่แนะนำตรรกะภายนอกสูงหรือลอจิกต่ำ
PWM = หมายถึงอินพุตควบคุม PWM จากไฟล์ เครื่องกำเนิดรูปคลื่น PWM ภายนอก
อินพุต PWM นี้อาจเป็นตัวแปรสำหรับการควบคุมความเร็วที่ต้องการของมอเตอร์ BLDC ที่เชื่อมต่อ
ช่องว่างที่เป็นจุดตรงกลางชิปแสดงถึงแผ่นระบายความร้อนซึ่งอาจถูกยึดหรือกดด้วยฮีทซิงค์เพื่อระบายความร้อนที่อาจเกิดขึ้นบนชิปในขณะที่ใช้กับมอเตอร์ BLDC ที่โหลด
การสนทนาข้างต้นระบุพินเอาต์หรือรายละเอียดการเชื่อมต่อของชิปไดรเวอร์มอเตอร์ BLDC แบบไม่มีเซ็นเซอร์ DRV10963 ตอนนี้เรามาวิเคราะห์การกำหนดค่าภายในและการทำงานของชิปโดยละเอียดด้วยความช่วยเหลือของประเด็นต่อไปนี้:
คำอธิบายอุปกรณ์
DRV10963 เป็นตัวดำเนินการมอเตอร์ไฟฟ้าแบบไม่เซ็นเซอร์ 3 เฟสพร้อม MOSFET กำลังในตัว (3 เฟส H-bridged) ได้รับการปรับแต่งเพื่อประสิทธิภาพการทำงานที่สูงขึ้นลดเสียงรบกวนและฟังก์ชั่นการขับเคลื่อนมอเตอร์นับวัสดุรองน้อย รูปแบบการจัดการไซน์ไซน์ 180 °แบบไร้เซนเซอร์แบบไร้เซ็นเซอร์ช่วยเพิ่มประสิทธิภาพในการเดินทางด้วยมอเตอร์ที่ปราศจากเสียงรบกวน
DRV10963 ประกอบด้วยฟังก์ชั่นตรวจจับล็อคอัจฉริยะรวมกับวงจรความปลอดภัยเสริมในตัวเพื่อให้ได้ประสิทธิภาพที่ปลอดภัย DRV10963 สามารถพบได้ในบรรจุภัณฑ์ USON 10 พินที่มีประสิทธิภาพทางความร้อนพร้อมแผ่นระบายความร้อนแบบเปิด
IC ทำงานอย่างไร
ผลิตภัณฑ์ DRV10963 เป็นตัวดำเนินการมอเตอร์แบบไม่เซ็นเซอร์ 3 เฟสพร้อม MOSFET กำลังไฟผสมอยู่
สร้างขึ้นโดยเฉพาะเพื่อประสิทธิภาพที่เหนือกว่าเสียงสะท้อนที่ลดลงและฟังก์ชั่นไดรฟ์มอเตอร์นับชิ้นส่วนตื้นขั้นต่ำ
แผนการควบคุมแบบไซน์นอสไร้เซนเซอร์ที่ไม่มีหน้าต่างน้อยกว่า 180 °นำเสนอการทำงานของมอเตอร์ที่ไม่มีเสียงโดยการรักษาระลอกแรงบิดที่กระตุ้นด้วยไฟฟ้า เมื่อเริ่มต้นอุปกรณ์ DRV10963 จะหมุนมอเตอร์ในหลักสูตรที่ระบุผ่านขาอินพุต FR
ชิป DRV10963 จะทำหน้าที่เป็นมอเตอร์ BLDC 3 เฟสโดยใช้แผนการควบคุมไซน์
ความสำคัญของแรงดันไฟฟ้าเฟสไซน์ที่ใช้ขึ้นอยู่กับรอบการทำงานของพิน PWM ในขณะที่มอเตอร์เคลื่อนที่ DRV10963 IC จะส่งข้อมูลความเร็วที่ขา FG
ชุด DRV10963 ประกอบด้วยความสามารถในการล็อคอัจฉริยะ ในกรณีที่มอเตอร์ถูกควบคุมโดยแรงดันภายนอกโปรแกรมจะระบุปัญหาการล็อคและจะใช้มาตรการเพื่อป้องกันตัวเองพร้อมกับมอเตอร์
ขั้นตอนเฉพาะของวงจรตรวจจับการล็อกจะแสดงรายละเอียดในการตรวจจับการล็อก DRV10963 IC นอกจากนี้ยังมีวงจรความปลอดภัยในตัวหลายวงจรเช่นการป้องกันกระแสไฟเกินการป้องกันแรงดันไฟฟ้าการป้องกันแรงดันไฟฟ้าและการป้องกันอุณหภูมิเกิน
คำอธิบายลักษณะ
อินพุตและการควบคุมความเร็ว
DRV10963 นำเสนอเอาต์พุต PWM 3 เฟส 25 kl-lz ซึ่งอาจมีเปอร์เซ็นต์มาตรฐานของรูปคลื่นไซน์จากเฟสหนึ่งไปอีกเฟส ในกรณีที่กำหนดวัฏจักรใด ๆ เกี่ยวกับกราวด์รูปคลื่นที่ตรวจพบน่าจะเป็นไซนัสที่ป้องกันด้วย PWM รวมกับฮาร์มอนิกลำดับที่ 3 ดังแสดงในรูปที่ 2

กลยุทธ์การเข้ารหัสนี้ช่วยเพิ่มความคล่องตัวให้กับข้อกำหนดของไดรเวอร์ด้วยเหตุผลที่ว่ามักจะมีเอาต์พุตเฟสเดียวที่สามารถเทียบเคียงกับศูนย์ได้
แอมพลิจูดผลลัพธ์จะแตกต่างกันไปตามแรงดันไฟฟ้า (VCC) และรอบการทำงาน PWM ที่ได้รับคำสั่ง (PWM) ตามที่กำหนดไว้ในสมการที่ 1 และไฮไลต์ในรูปที่ 3 แอมพลิจูดที่เหมาะสมจะถูกนำมาใช้เมื่อรอบการทำงานของ PWM ที่ได้รับคำสั่งคือ 100 PERCENT
Vphpk = PWMdc>

ความเร็วของมอเตอร์ไม่ได้ถูกควบคุมโดยตรงผ่านการใช้คำสั่ง PWM เพื่อควบคุมแอมพลิจูดของแรงดันไฟฟ้าเฟสที่เกิดขึ้นกับมอเตอร์
รอบการทำงานของอินพุต PWM ถูกปรับเปลี่ยนเป็นปริมาณดิจิทัล 9 บิต (จาก 0 ถึง 511)
ความละเอียดของระเบียบคือ 1/512 == 0.2% เครื่องวิเคราะห์วัฏจักรหน้าที่อำนวยความสะดวกในการดำเนินการแลกเปลี่ยนคำสั่งเริ่มต้นระหว่างรอบหน้าที่ป้อนข้อมูลและตัวเลขดิจิทัล 9 บิต
สิ่งนี้เน้นในรูปที่ 4 ซึ่ง r = 80 ms

ประสิทธิภาพการแลกเปลี่ยนระหว่างรอบการทำงานตามคำสั่งของ PWM พร้อมกับแอมพลิจูดสูงสุดของเอาต์พุตเป็นตัวแปรในอุปกรณ์ DRV10963
แอมพลิจูดสูงสุดของผลลัพธ์ถูกกล่าวถึงโดยสมการ 1 เมื่อคำสั่ง PWM> รอบหน้าที่การทำงานขั้นต่ำ รอบการปฏิบัติงานต่ำสุดมักจะกำหนดเป็น 13%, 10%, 5% หรือไม่มีข้อ จำกัด ใด ๆ โดยการตั้งค่า OTP (MINOP_DC1: 0)
ตารางที่ 1 แสดงการกำหนดค่าที่แนะนำสำหรับรอบการทำงานขั้นต่ำ
เมื่อใดก็ตามที่รอบการทำงานที่ได้รับคำสั่งจาก PWM น้อยกว่ารอบการทำงานที่ต่ำที่สุดและมากกว่า 1.5% เอาต์พุตจะถูกควบคุมที่รอบการทำงานขั้นต่ำ เมื่อใดก็ตามที่รอบการทำงานของอินพุตต่ำกว่า 1.5% อุปกรณ์ DRV10963 จะไม่รันเอาต์พุตและจะถูกส่งไปยังโหมดสแตนด์บาย
สามารถแสดงได้ในรูปที่ 6

การกำหนดค่าการหมุน
DRV10963 จะสตาร์ทมอเตอร์โดยใช้เทคนิคที่มีรายละเอียดอย่างละเอียดในรูปที่ 7

กราฟการเริ่มต้นของมอเตอร์ประกอบด้วยทางเลือกที่กำหนดค่าได้ของอุปกรณ์สำหรับลูปเปิดเพื่อปิดขีด จำกัด การเปลี่ยนลูป (HOW.) เวลาจัดตำแหน่ง (TAHQH) และอัตราเร่ง (RACE)
ในการจัดแนวโรเตอร์ให้เข้ากับตรรกะการเปลี่ยน DRV10963 จะรันรอบการทำงาน x% ในเฟส V และ W ในเวลาเดียวกันในการควบคุมเฟส U ที่ GND
สถานการณ์นี้คงอยู่เป็นเวลา TAIign วินาที ความสำคัญ x% ถูกระบุโดยแรงดันไฟฟ้า VCC (ดังแสดงในตารางที่ 2) เพื่อรักษาแรงบิดในการหมุนให้เพียงพอกับแรงดันไฟฟ้าที่แตกต่างกัน
เมื่อลำดับการจัดตำแหน่งเสร็จสิ้นมอเตอร์จะถูกบังคับให้เร่งความเร็วโดยใส่แรงดันไฟฟ้าเฟสไซน์ที่มีระดับสูงสุดดังแสดงในตารางที่ 2 และเพิ่มโดยใช้ช่วงการเปลี่ยนที่อัตราการขยายที่แสดงโดย RACE จนกว่าระดับของการเปลี่ยนจะเพิ่มขึ้นเป็น Hom ., เฮิรตซ์
ทันทีที่ถึงขีด จำกัด นี้ DRV'l0963 จะแปลงเป็นโหมดวงปิดโดยที่ความก้าวหน้าของการเปลี่ยนไดรฟ์จะรับรู้โดยอัลกอริธึมควบคุมในตัวในขณะที่แรงดันไฟฟ้าที่ใช้จะถูกระบุโดยอินพุตรอบการทำงานที่ได้รับคำสั่ง PWM
ลูปเปิดเพื่อปิดขีด จำกัด การเปลี่ยนลูป (Hom), เวลาจัดตำแหน่ง (TAHQH) และอัตราเร่ง (RACE) สามารถกำหนดค่าได้ผ่านการกำหนดค่า OTP
โดยทั่วไปการเลือกเกณฑ์แฮนด์ออฟ (HOW,) จะได้รับการอนุมัติโดยการประเมินแบบลองผิดลองถูก วัตถุประสงค์คือต้องการความทนทานต่อแฮนด์ออฟที่อาจน้อยที่สุดเท่าที่จะเป็นไปได้และช่วยให้มอเตอร์สามารถเปลี่ยนระหว่างการเร่งความเร็วแบบวงเปิดและการเร่งวงปิดได้อย่างง่ายดาย
มอเตอร์ความเร็วที่เพิ่มขึ้นโดยทั่วไป (ความเร็วสูงสุด) จำเป็นต้องมีความทนทานต่อแฮนด์ออฟที่เหนือกว่าเนื่องจากมอเตอร์ความเร็วสูงประกอบด้วย Kt ที่ลดลงดังนั้น BEMF ที่ราคาไม่แพงกว่า
ตารางที่ 3 แสดงให้เห็นถึงการกำหนดค่าตามความชอบสำหรับความทนทานต่อแฮนด์ออฟ ความเร็วสูงสุดใน Hz ไฟฟ้าได้รับการพิสูจน์แล้วว่าเป็นข้อมูลอ้างอิงเพื่อช่วยในการเลือกความเร็วแฮนด์ออฟที่ต้องการสำหรับการส่งเฉพาะ

การเลือกเวลาจัดแนว (TAHQH) และอัตราเร่ง (RACE) อาจขึ้นอยู่กับการตรวจสอบแบบลองผิดลองถูก
โดยปกติแล้วมอเตอร์ที่มีความเฉื่อยมากกว่าจะต้องการเวลาในการจัดตำแหน่งที่ยาวนานขึ้นและอัตราการเร่งความเร็วที่ช้ากว่าในทางตรงกันข้ามกับมอเตอร์ที่มีความเฉื่อยต่ำซึ่งโดยทั่วไปต้องการเวลาในการจัดแนว briefer ร่วมกับเปอร์เซ็นต์การเร่งที่เร็วกว่า การแลกเปลี่ยนโปรแกรมจำเป็นต้องได้รับการดำเนินการเพื่อใช้ประโยชน์จากเสถียรภาพในการเปิดตัวเมื่อเทียบกับช่วงเวลาหมุนเวียน
TI ให้การรับรองโดยเริ่มจากการตัดสินใจเลือกการกำหนดค่าที่เข้มข้นน้อยกว่า (RACE ที่ช้าลงและ Tmign ที่สำคัญ) เพื่อลดเวลาในการเพิ่มแรงบิดเพื่อรองรับอัตราการเติมเต็มสูงสุด
ทันทีที่อุปกรณ์ได้รับการยืนยันว่าทำงานได้อย่างเป็นธรรมการกำหนดค่าที่มีประสิทธิภาพพิเศษ (RACC ที่มากขึ้นและ TAHQH ที่น้อยกว่า) อาจถูกนำมาใช้เพื่อลดเวลาในการเปิดเครื่องและในขณะเดียวกันก็คอยติดตามอัตราการปฏิบัติตามอย่างระมัดระวัง
ตารางที่ 4 แสดงการตั้งค่าที่กำหนดได้สำหรับ TA'g และ RACE

ส่วนที่เหลือของคำอธิบายเกี่ยวกับ BLDC IC แบบไร้เซ็นเซอร์นี้ได้รับการตกแต่ง ในเอกสารข้อมูลต้นฉบับนี้
โปรดอย่าลังเลที่จะแสดงความคิดเห็นเพื่อทราบข้อมูลเพิ่มเติมเกี่ยวกับรายละเอียดวงจรขับมอเตอร์ BLDC ไร้เซ็นเซอร์ที่กล่าวถึงข้างต้น
คู่ของ: วงจรจ่ายไฟกระเป๋าเป้ LED 12V ถัดไป: วงจรควบคุมระยะไกล Quadcopter ที่ไม่มี MCU