
ไมโครคอนโทรลเลอร์คือคอมพิวเตอร์ขนาดเล็กบน IC เครื่องเดียวที่รวมคุณสมบัติทั้งหมดที่พบในไมโครโปรเซสเซอร์ เพื่อตอบสนองแอปพลิเคชันที่แตกต่างกันจึงมีสิ่งอำนวยความสะดวกชิปที่มีความเข้มข้นสูงเช่น RAM, ROM, พอร์ต I / O, ตัวจับเวลา, พอร์ตอนุกรม, วงจรนาฬิกาและอินเทอร์รัปต์ ไมโครคอนโทรลเลอร์ใช้ในอุปกรณ์ที่ควบคุมโดยอัตโนมัติต่างๆเช่นรีโมทคอนโทรลระบบควบคุมเครื่องยนต์รถยนต์อุปกรณ์ทางการแพทย์เครื่องมือไฟฟ้าเครื่องใช้สำนักงานของเล่นและอื่น ๆ ระบบฝังตัว . ดังนั้นบทความนี้จะให้ภาพรวมของพินไดอะแกรมของไมโครคอนโทรลเลอร์ 8051 พร้อมคำอธิบายและยัง แนวคิดโครงการตาม 8051 .

ไมโครคอนโทรลเลอร์ 8051
ในกรณีของไมโครโปรเซสเซอร์เราต้องเชื่อมต่อวงจรเพิ่มเติมภายนอกเช่น RAM, ROM, พอร์ต I / O, ตัวจับเวลา, พอร์ตอนุกรม, วงจรนาฬิกาและอุปกรณ์ต่อพ่วงภายนอกอื่น ๆ ในขณะที่ไมโครคอนโทรลเลอร์อุปกรณ์ต่อพ่วงเหล่านี้ทั้งหมดอยู่ในตัว ให้เราดูคร่าวๆเกี่ยวกับแผนภาพพินของไมโครคอนโทรลเลอร์ 8051
ไมโครคอนโทรลเลอร์พินทำงาน
ไมโครคอนโทรลเลอร์ 8051 มีพอร์ต I / O สี่พอร์ตโดยในแต่ละพอร์ตมี 8 พินที่สามารถกำหนดค่าเป็นอินพุตหรือเอาต์พุตได้ การกำหนดค่า Pin - ไม่ว่าจะกำหนดค่าเป็น I / P (1) หรือ O / P (0) ขึ้นอยู่กับสถานะลอจิก ในการกำหนดค่าพินไมโครคอนโทรลเลอร์เป็นเอาต์พุตจำเป็นต้องใช้ศูนย์ลอจิก (0) กับบิตพอร์ต I / O ที่เหมาะสม ในกรณีนี้ระดับแรงดันไฟฟ้าที่ขาที่เหมาะสมจะเป็น 0
ในทำนองเดียวกันในการกำหนดค่าพินไมโครคอนโทรลเลอร์เป็นอินพุตจำเป็นต้องใช้ลอจิกหนึ่ง (1) กับพอร์ตที่เหมาะสม ในกรณีนี้ระดับแรงดันไฟฟ้าบนพินที่เหมาะสมจะเป็น 5V สิ่งนี้อาจดูสับสนทุกอย่างชัดเจนหลังจากการศึกษา วงจรอิเล็กทรอนิกส์อย่างง่าย เชื่อมต่อกับพิน I / O
ขาอินพุต / เอาท์พุต (I / O)
รูปด้านล่างแสดงแผนผังที่เรียบง่ายของวงจรทั้งหมดภายในไมโครคอนโทรลเลอร์ซึ่งเชื่อมต่อกับหมุดตัวใดตัวหนึ่ง ระบุถึงพินทั้งหมดยกเว้นพอร์ต P0 ที่ไม่มีตัวต้านทานแบบดึงขึ้นในตัว

ขาอินพุต / เอาท์พุต (I / O)
ขาออก
ลอจิก 0 ถูกนำไปใช้กับบิตของรีจิสเตอร์ P จากนั้นทรานซิสเตอร์เอาต์พุต FE จะเปิดอยู่ดังนั้นจึงเชื่อมต่อพินที่เหมาะสมกับกราวด์

ขาออก
ขาเข้า
ตรรกะ 1 ถูกนำไปใช้กับบิตของรีจิสเตอร์ ผลลัพธ์ ทรานซิสเตอร์สนามผล ถูกปิดและพินที่เหมาะสมยังคงเชื่อมต่อกับแรงดันไฟฟ้าของแหล่งจ่ายไฟเหนือตัวต้านทานแบบดึงขึ้นที่มีความต้านทานสูง

ขาเข้า
Pin Diagram ของไมโครคอนโทรลเลอร์ 8051
ไมโครคอนโทรลเลอร์ 8051 ตระกูล (89C51, 8751, DS89C4xO, 89C52) มาในแพ็คเกจที่แตกต่างกันเช่นแพ็คเกจ Quad-Flat ผู้ให้บริการชิปไร้สารตะกั่วและแพ็คเกจดูอัลอินไลน์ แพ็กเกจทั้งหมดเหล่านี้ประกอบด้วยพิน 40 พินซึ่งมีไว้สำหรับฟังก์ชันต่างๆเช่น I / O, แอดเดรส, RD, WR, ข้อมูลและอินเทอร์รัปต์ แต่บาง บริษัท เสนอเวอร์ชัน 20 พินของไฟล์ ไมโครคอนโทรลเลอร์ สำหรับแอพพลิเคชั่นที่มีความต้องการน้อยโดยลดจำนวนพอร์ต I / O อย่างไรก็ตามนักพัฒนาส่วนใหญ่ใช้ชิป 40 พิน

Pin Diagram ของไมโครคอนโทรลเลอร์ 8051
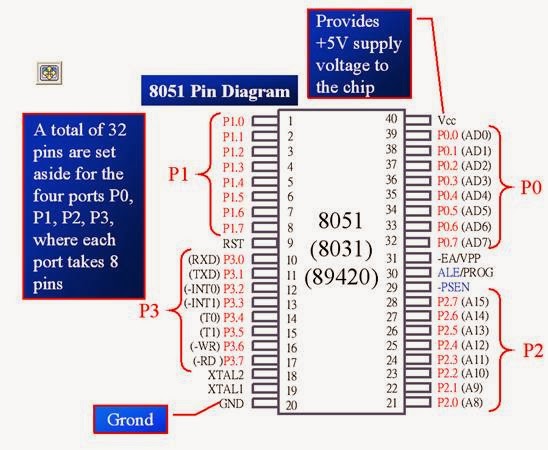
แผนภาพพินของไมโครคอนโทรลเลอร์ 8051 ประกอบด้วยหมุด 40 พินดังที่แสดงด้านล่าง ทั้งหมด 32 พินถูกตั้งค่าออกเป็นสี่พอร์ตเช่น P0, P1, P2 และ P3 โดยที่แต่ละพอร์ตมี 8 พิน ดังนั้นแผนภาพพินของไมโครคอนโทรลเลอร์ 8051 และคำอธิบายจะได้รับด้านล่าง
- พอร์ต 1 (Pin1 ถึง Pin8): Port1 ประกอบด้วย pin1.0 ถึง pin1.7 และพินเหล่านี้สามารถกำหนดค่าเป็นพินอินพุตหรือเอาต์พุตได้
- พิน 9 (RST): รีเซ็ตพินใช้เพื่อรีเซ็ตไมโครคอนโทรลเลอร์ 8051 โดยให้พัลส์บวกกับพินนี้
- พอร์ต 3 (พิน 10 ถึง 17): Port3 Pins คล้ายกับพินพอร์ต 1 และสามารถใช้เป็นพินอินพุตหรือเอาต์พุตสากลได้ พินดูอัลฟังก์ชันพินเหล่านี้และฟังก์ชันของพินแต่ละพินมีดังนี้:
- พิน 10 (RXD): ขา RXD คืออินพุตการสื่อสารแบบอะซิงโครนัสแบบอนุกรมหรือ การสื่อสารแบบซิงโครนัสแบบอนุกรม เอาต์พุต
- พิน 11 (TXD): Serial Asynchronous Communication Output หรือ Serial Synchronous Communication clock Output
- พิน 12 (INT0): อินพุตของอินเตอร์รัปต์ 0
- พิน 13 (INT1): อินพุตของอินเทอร์รัปต์ 1
- ขา 14 (T0): อินพุตของเคาน์เตอร์ 0 นาฬิกา
- พิน 15 (T1): อินพุตของเคาน์เตอร์ 1 นาฬิกา
- พิน 16 (WR): Writing Signal เพื่อเขียนเนื้อหาบน RAM ภายนอก
- ขา 17 (RD): การอ่านสัญญาณเพื่ออ่านเนื้อหาของแรมภายนอก
- Pin 18 และ 19 (XTAL2, XTAL1): หมุด X2 และ X1 เป็นพินอินพุตเอาต์พุตสำหรับออสซิลเลเตอร์ หมุดเหล่านี้ใช้เพื่อเชื่อมต่อออสซิลเลเตอร์ภายในกับไมโครคอนโทรลเลอร์
- พิน 20 (GND): พิน 20 เป็นพินกราวด์
- พอร์ต 2 (Pin 21 ถึง Pin28): Port2 ประกอบด้วย pin21 ถึง pin28 ซึ่งสามารถกำหนดค่าเป็นพินอินพุตเอาต์พุต แต่จะเกิดขึ้นได้ก็ต่อเมื่อเราไม่ได้ใช้หน่วยความจำภายนอก หากเราใช้หน่วยความจำภายนอกพินเหล่านี้จะทำงานเป็นบัสแอดเดรสลำดับสูง (A8 ถึง A15)
- ขา 29 (PSEN): พินนี้ใช้เพื่อเปิดใช้งานหน่วยความจำโปรแกรมภายนอก หากเราใช้ ROM ภายนอกในการจัดเก็บโปรแกรมลอจิก 0 จะปรากฏขึ้นซึ่งบ่งชี้ว่าไมโครคอนโทรลเลอร์อ่านข้อมูลจากหน่วยความจำ
- ขา 30 (ALE): Address Latch Enable pin คือสัญญาณเอาต์พุตสูงที่ใช้งานอยู่ หากเราใช้ชิปหน่วยความจำหลายตัวพินนี้จะใช้เพื่อแยกความแตกต่างระหว่างชิปเหล่านี้ พินนี้ยังให้อินพุตพัลส์โปรแกรมระหว่างการเขียนโปรแกรม EPROM
- พิน 31 (EA): หากเราต้องใช้ความทรงจำหลายตัวการใช้ลอจิก 1 กับพินนี้จะสั่งให้ไมโครคอนโทรลเลอร์อ่านข้อมูลจากความทรงจำทั้งสอง: ภายในก่อนและจากภายนอก
- พอร์ต 0 (Pin 32 ถึง 39): เช่นเดียวกับพินพอร์ต 2 และ 3 พินเหล่านี้สามารถใช้เป็นพินอินพุตเอาต์พุตเมื่อเราไม่ได้ใช้หน่วยความจำภายนอกใด ๆ เมื่อ ALE หรือ Pin 30 อยู่ที่ 1 พอร์ตนี้จะถูกใช้เป็นบัสข้อมูล: เมื่อ ALE พินอยู่ที่ 0 พอร์ตนี้จะใช้เป็นบัสแอดเดรสลำดับที่ต่ำกว่า (A0 ถึง A7)
- พิน 40 (VCC): พิน VCC นี้ใช้สำหรับแหล่งจ่ายไฟ
มีการใช้งานไมโครคอนโทรลเลอร์ 8051 มากมาย ดังนั้น 8051 โครงการไมโครคอนโทรลเลอร์ เหมาะสำหรับปีสุดท้ายด้านวิศวกรรม ดังนั้นคุณสามารถอ้างอิงโครงการใดโครงการหนึ่งในรายการด้านล่างเพื่อทำความเข้าใจการทำงานของหมุดไมโครคอนโทรลเลอร์ 8051 ในทางปฏิบัติ

โครงการไมโครคอนโทรลเลอร์ 8051
- การหมุนแบบสองทิศทางของ มอเตอร์เหนี่ยวนำเฟสเดียว ไม่มี Run Capacitor
- แรงดันเกิน - ภายใต้การป้องกันแรงดันไฟฟ้า
- Wireless Rash Driving Detection
- ใช้ Arduino ระบบอัตโนมัติในบ้าน
- การดำเนินการโหลดตามลำดับโปรแกรมจากระยะไกลที่ใช้ Android
- War Field Spying Robot พร้อมกล้อง Night Vision Wireless โดยแอปพลิเคชัน Android
- การควบคุมเครื่องใช้ภายในประเทศที่ดำเนินการระยะไกลโดยแอปพลิเคชัน Android
- อัตโนมัติตามความหนาแน่น การควบคุมสัญญาณไฟจราจร ด้วยการแทนที่ระยะไกลที่ใช้ Android
- การทำงานสี่ส่วนของมอเตอร์กระแสตรงควบคุมจากระยะไกลโดยแอปพลิเคชัน Android
- การจัดตำแหน่งระยะไกลของการวางตำแหน่งจาน 3D โดยแอปพลิเคชัน Android
- การเปิดประตูควบคุมระยะไกลตามรหัสผ่านโดยแอปพลิเคชัน Android
- ยานยนต์หุ่นยนต์ควบคุมด้วยเสียงพร้อมระบบจดจำเสียงทางไกล
- การตรวจสอบระยะไกลโดยใช้ XBEE จาก 3 พารามิเตอร์บน Transformer / Generator Health พร้อมประกาศด้วยเสียงและอินเทอร์เฟซพีซีไร้สาย
- การดำเนินการประตูข้ามระดับทางรถไฟจากระยะไกลโดย Android
- ระบบอัตโนมัติในบ้านโดยแอปพลิเคชัน Android ใช้รีโมทคอนโทรล
- การถ่ายโอนพลังงานแบบไร้สาย i n พื้นที่ 3 มิติ
- สัญญาณจราจรตามความหนาแน่นพร้อมรีโมทแทนที่ในกรณีฉุกเฉิน
- การตรวจสอบระยะไกลจาก XBEE โดยใช้พารามิเตอร์ 3 ตัวเกี่ยวกับสุขภาพของหม้อแปลง / เครื่องกำเนิดไฟฟ้า
- Self-Switching Power Supply
- ที่จอดรถแบบเสียเงินตาม RFID
- ไฟฉุกเฉินอัตโนมัติแบบ LED
- ตัวควบคุมระดับของเหลวแบบไม่สัมผัส
นี่เป็นเรื่องเกี่ยวกับหมุดไมโครคอนโทรลเลอร์ที่ใช้งานได้ตามเวลาจริง แนวคิดโครงการตามไมโครคอนโทรลเลอร์ 8051 . นอกจากนี้ข้อสงสัยใด ๆ เกี่ยวกับบทความนี้หรือ โครงการอิเล็กทรอนิกส์ล่าสุด ติดต่อเราโดยแสดงความคิดเห็นในส่วนความคิดเห็นด้านล่าง
เครดิตภาพ:
Pin Diagram ของไมโครคอนโทรลเลอร์ 8051 blogspot
ไมโครคอนโทรลเลอร์ 8051 cotsjournalonline
















{kind=link}