ด้วยการพัฒนาเทคโนโลยีโดยเฉพาะอย่างยิ่งในเทคโนโลยีหุ่นยนต์หุ่นยนต์มีความโดดเด่นในหลาย ๆ แอพพลิเคชั่น บางส่วนเป็นประเภทที่มีความเสี่ยงสูงและเป็นพื้นที่อันตราย การใช้งานทางทหารและสนามรบกำลังเพิ่มการใช้งานหุ่นยนต์ในงานที่สำคัญและซับซ้อนบางอย่าง ในบทความหนึ่งของฉันฉันได้อธิบายถึงการใช้ Robots เป็นสายลับในปฏิบัติการทางทหาร ตอนนี้ถ้ามีความจำเป็นสำหรับการป้องกันของ ยานยนต์ หรือการโจมตีโดยหุ่นยนต์? นั่นคือจุดที่ความต้องการหุ่นยนต์ที่ฝังกลไกการโจมตีเกิดขึ้น ตัวอย่างเช่นรถหุ่นยนต์ที่มีปืน LASER

ยานยนต์ควบคุมด้วยคลื่นความถี่วิทยุพร้อมการจัดเรียงลำแสงเลเซอร์
หุ่นยนต์ดังกล่าวถูกใช้โดยทั่วไปในปฏิบัติการทางทหารและตำรวจจราจรเพื่อตรวจจับความเร็วของยานพาหนะที่กำลังเคลื่อนที่
ก่อนที่จะไปดูรายละเอียดเกี่ยวกับหุ่นยนต์ที่มีปืนเลเซอร์ให้เราทำความเข้าใจอย่างรวดเร็วเกี่ยวกับ LASER ในฐานะอาวุธ
ลำแสง LASER (Light Amplification by Stimulation Emission) เป็นลำแสงที่โฟกัสอย่างแรงแบบทิศทางเดียวซึ่งแตกต่างจากหลอดไฟธรรมดา ประกอบด้วยรางและยอดที่ซิงโครไนซ์เช่นคลื่นไม่รบกวนซึ่งกันและกัน สิ่งนี้ทำให้เกิดแสงที่โฟกัสอย่างรุนแรงโดยมีกำลังสูงมากซึ่งสูงกว่าหลอดไฟทั่วไป 1,000 ถึง 1 ล้านเท่า เป็นอุปกรณ์ที่ควบคุมการปล่อยและดูดซึมโฟตอนโดยการสูบพลังงานในปริมาณที่เพียงพอ ด้วยเหตุนี้แหล่งที่มาของโฟตอนจะถูกขยายเป็นลำแสง ความยาวคลื่นของเลเซอร์เหล่านี้แตกต่างกันไปตามสเปกตรัมต่างๆเช่นที่มองเห็นได้อินฟราเรดและอัลตราไวโอเลต
หลักการที่อยู่เบื้องหลัง LASER หมุนรอบสามสิ่ง ได้แก่ การดูดซึมการปล่อยออกมาเองและการปล่อยที่ถูกกระตุ้น ปริมาณพลังงานที่เพียงพอจากโฟตอนทำปฏิกิริยากับอะตอมทำให้อะตอมกระโดดจากสถานะพลังงานต่ำไปสู่สถานะพลังงานที่สูงขึ้น อะตอมนี้จะถอยกลับไปสู่สถานะพลังงานที่ต่ำกว่าโดยการปล่อยโฟตอนที่เรียกว่าการปล่อยที่เกิดขึ้นเอง ในการกระตุ้นการปล่อยคือการปลดปล่อยพลังงานจากอะตอมด้วยวิธีเทียม ดังนั้นโฟตอนจึงมีปฏิสัมพันธ์กับอะตอมที่ถูกกระตุ้นมีพลังงานและโพลาไรซ์เช่นเดียวกับโฟตอนที่ตกกระทบ
ตอนนี้ให้เราดูชิ้นส่วนฮาร์ดแวร์ของหุ่นยนต์
- ฐาน: ฐานของหุ่นยนต์ดังกล่าวอาจเป็นตัวลูกบาศก์ใด ๆ ที่มีล้อติดอยู่เพื่อการเคลื่อนไหว
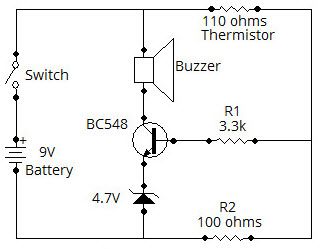
- มอเตอร์กระแสตรง: หุ่นยนต์ประกอบด้วยมอเตอร์กระแสตรงสองตัวที่ขับเคลื่อนโดยตัวขับมอเตอร์และให้การเคลื่อนไหวที่จำเป็นแก่หุ่นยนต์
- หน่วยควบคุม: การเคลื่อนไหวของหุ่นยนต์ควบคุมโดยใช้โมดูลการสื่อสาร RF เครื่องส่งประกอบด้วยปุ่มกดไมโครคอนโทรลเลอร์ตัวถอดรหัสและตัวส่งสัญญาณ RF ในขณะที่ชุดรับสัญญาณที่ฝังอยู่บนหุ่นยนต์ประกอบด้วยตัวเข้ารหัสและโมดูลตัวรับสัญญาณ RF เพื่อควบคุม การเคลื่อนไหวของหุ่นยนต์ .
- ปืนเลเซอร์: ปืนเลเซอร์ติดตั้งอยู่บนหุ่นยนต์ซึ่งทำหน้าที่หลักของหุ่นยนต์
แอบดูหุ่นยนต์ทำงาน
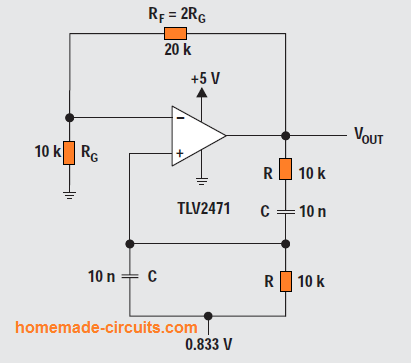
หุ่นยนต์ขณะเคลื่อนที่ไปในทิศทางที่ต้องการจะยิงลำแสงที่รุนแรงจากปืน LASER ซึ่งอาจเป็นอันตรายต่อเป้าหมายหรือเพียงแค่สร้างจุดเพื่อตรวจจับเป้าหมาย เลเซอร์จำเป็นต้องขับเคลื่อนด้วยแหล่งพลังงานบางอย่าง ในการออกแบบต้นแบบที่เรียบง่ายโดยใช้ปากกา LASER พื้นฐานอุปกรณ์จะขับเคลื่อนด้วยทรานซิสเตอร์ที่ทำหน้าที่เป็นสวิตช์ ทรานซิสเตอร์ได้รับสัญญาณลอจิกต่ำจากไมโครคอนโทรลเลอร์และอยู่ในสภาวะปิดทำให้โมดูล LASER เชื่อมต่อโดยตรงกับแหล่งจ่ายไฟ 5 V

ปืนเลเซอร์ขับเคลื่อนด้วยทรานซิสเตอร์ทำงานเป็นอินเวอร์เตอร์
การควบคุมหุ่นยนต์
ในการควบคุมการเคลื่อนที่ของหุ่นยนต์จำเป็นต้องควบคุมการทำงานของมอเตอร์ สามารถทำได้โดยใช้ RF ควบคุมการทำงานของไดรเวอร์มอเตอร์ คำสั่งจะถูกส่งโดยใช้เครื่องส่ง RF ที่หน่วยระยะทางประมาณ 200 เมตรและได้รับจากตัวรับ RF เพื่อขับเคลื่อนมอเตอร์
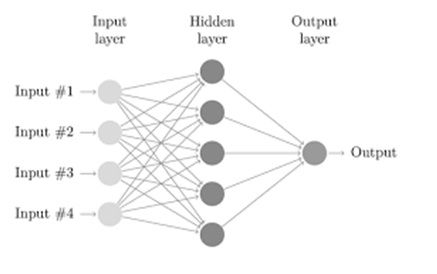
ชุดเครื่องส่งประกอบด้วยปุ่มกดหลายปุ่มที่ทำหน้าที่เป็นสวิตช์คำสั่งเพื่อให้หุ่นยนต์เคลื่อนที่ไปในทิศทางที่ต้องการ ปุ่มกดจะเชื่อมต่อกับไมโครคอนโทรลเลอร์ซึ่งได้รับการตั้งโปรแกรมให้ส่งข้อมูลในรูปแบบขนานตามอินพุตปุ่มกดไปยังตัวเข้ารหัส ตัวเข้ารหัสจะแปลงข้อมูลแบบขนานนี้เป็นรูปแบบอนุกรมและข้อมูลอนุกรมนี้จะถูกส่งโดยใช้โมดูลเครื่องส่ง RF ผ่านเสาอากาศ

แผนภาพบล็อกแสดงส่วนเครื่องส่งสัญญาณ
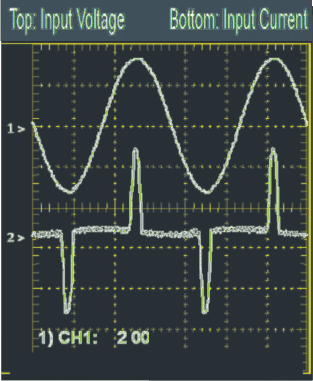
ชุดเครื่องรับประกอบด้วยโมดูลตัวรับสัญญาณ RF ซึ่งรับสัญญาณมอดูเลตและถอดรหัสสัญญาณ ตัวถอดรหัสจะรับสัญญาณ demodulated ในรูปแบบอนุกรมและแปลงเป็นรูปแบบขนาน ไมโครคอนโทรลเลอร์รับสัญญาณและควบคุมตัวขับมอเตอร์ให้เหมาะสม ตัวขับมอเตอร์ที่ใช้ใน LM293D ซึ่งสามารถควบคุมมอเตอร์ได้ 2 ตัวพร้อมกัน

แผนภาพบล็อกแสดงส่วนผู้รับ
ดังนั้นการใช้การสื่อสาร RF เราสามารถควบคุมหุ่นยนต์ได้
ในคำอธิบายข้างต้นฉันได้ให้แนวคิดสั้น ๆ เกี่ยวกับต้นแบบง่ายๆของยานยนต์หุ่นยนต์ที่มีลำแสง LASER ในการใช้งานจริงโดยปกติแล้วระบบสื่อสารระยะไกลเช่น GSM หรือ DTMF จะใช้เพื่อควบคุมหุ่นยนต์จากที่ห่างไกล
3 การใช้งานยานยนต์หุ่นยนต์ด้วยปืนเลเซอร์:
- การตรวจจับเป้าหมาย : รถหุ่นยนต์สามารถใช้ลำแสง LASER เพื่อทำให้เกิดจุดบนเป้าหมายเพื่อให้มองเห็นได้ง่ายและสามารถกำหนดเป้าหมายได้ ตัวอย่างคือ Air Borne LASER
- การทำลายเป้าหมาย : ที่แข็งแกร่ง ลำแสงเลเซอร์ ของความถี่ 95GHz อาจทำให้เกิดความรู้สึกแสบร้อนในร่างกายมนุษย์ได้เมื่อมันทะลุผิวหนังเข้าไป 1/64ธพลังงานของลำแสงสามารถให้ความร้อนแก่โมเลกุลของน้ำในร่างกายได้ ตัวอย่างคือ Active Denial System ที่พัฒนาโดยสหรัฐอเมริกา
- เครื่องมือค้นหาระยะเป้าหมายและการตรวจจับความเร็ว : ลำแสง LASER จากยานยนต์หุ่นยนต์สามารถใช้เพื่อค้นหาระยะของเป้าหมายได้ด้วยหลักการสะท้อนแสง LASER และยังคำนวณความเร็วของเป้าหมายได้เมื่อเราได้ระยะ
ตอนนี้เรามีแนวคิดสั้น ๆ เกี่ยวกับหุ่นยนต์ที่ใช้เครื่องตรวจจับเป้าหมายและเรือพิฆาต มันมีประโยชน์สำหรับประชาชนทั่วไปนอกเหนือจากทหารหรือไม่? คิดและตอบ