บทความนี้กล่าวถึงวงจรควบคุมพัดลมแบบอินฟราเรดหรือวงจรหรี่ไฟโดยใช้ชิ้นส่วนธรรมดาเช่น IC 4017 และ 555 IC
การทำงานของวงจร
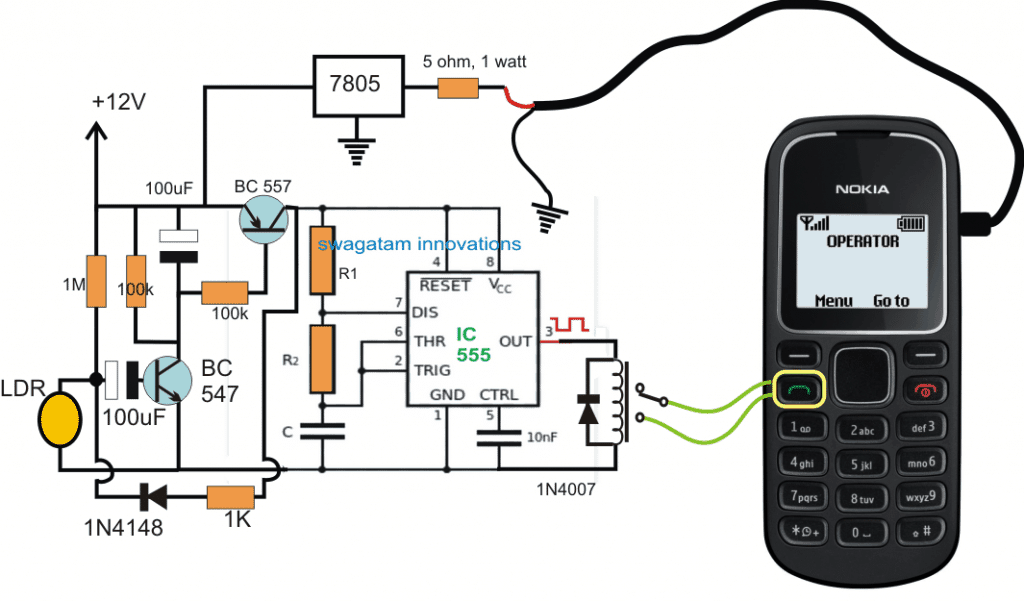
อ้างอิงถึงวงจรหรี่พัดลมควบคุมระยะไกลที่แสดงอาจเห็นขั้นตอนหลักสามขั้นตอน: ขั้นตอนเซ็นเซอร์สัญญาณอินฟราเรดโดยใช้ IC TSOP1738 ตัวนับทศวรรษของจอห์นสันซีเควนเซอร์โดยใช้ IC 4017 และขั้นตอนการประมวลผล PWM โดยใช้ IC 555

การทำงานต่างๆที่เกี่ยวข้องภายในวงจรสามารถเข้าใจได้ด้วยความช่วยเหลือของประเด็นต่อไปนี้:
เมื่อลำแสงอินฟราเรดถูกโฟกัสที่เซ็นเซอร์เซ็นเซอร์จะสร้างตรรกะที่ต่ำเพื่อตอบสนองต่อสิ่งนี้ซึ่งจะทำให้ PNP BC557 ดำเนินการ
การใช้เซนเซอร์ TSOP1738
เซ็นเซอร์ที่ใช้ที่นี่คือ TSOP1738 คุณสามารถเรียนรู้เพิ่มเติมได้ในสิ่งนี้ บทความการควบคุมระยะไกล IR อย่างง่าย
การนำของทรานซิสเตอร์ BC557 ในการตอบสนองต่อลำแสง IR จะเชื่อมโยงอุปทานบวกกับพิน 14 ของ IC 4017 ซึ่งเป็นที่ยอมรับว่าเป็นพัลส์นาฬิกาโดย IC
พัลส์นาฬิกานี้ถูกแปลเป็นฮอปตามลำดับเดียวของลอจิกสูงจากพินเอาต์ที่มีอยู่ไปยังพินเอาต์ถัดไปในลำดับข้ามเอาต์พุตที่แสดงของ IC 4017
การถ่ายโอนตามลำดับนี้หรือการเปลี่ยนพัลส์ลอจิกสูงจากพินหนึ่งไปยังอีกพินถัดไปในเอาต์พุตทั้งหมดจากพิน # 3 ไปยังพิน # 10 และด้านหลังจะดำเนินการตามการตอบสนองต่อลำแสงชั่วขณะที่โฟกัสไปที่เซ็นเซอร์ IR โดยโทรศัพท์ระยะไกล IR
การใช้ IC 4017 สำหรับการควบคุมตัวแบ่งแรงดันไฟฟ้า
เราจะเห็นว่าเอาท์พุท IC 4017 มีชุดตัวต้านทานที่คำนวณได้อย่างแม่นยำซึ่งปลายอิสระด้านนอกสั้นลงและเชื่อมต่อกับกราวด์ผ่านตัวต้านทาน 1K
การกำหนดค่าข้างต้นเป็นตัวแบ่งความเป็นไปได้ที่เป็นตัวต้านทานซึ่งสร้างการเพิ่มขึ้นตามลำดับหรือลดระดับศักยภาพที่โหนด 'A' เพื่อตอบสนองต่อการเปลี่ยนแปลงของลอจิกที่สูงข้ามเอาต์พุตตามที่กล่าวไว้ในคำอธิบายข้างต้น
ศักยภาพที่แตกต่างกันนี้สิ้นสุดลงที่ฐานของทรานซิสเตอร์ NPN ซึ่งตัวปล่อยสามารถมองเห็นได้เชื่อมต่อกับพิน # 5 ของ IC 555 ซึ่งกำหนดค่าเป็น Astable ความถี่สูง
ใช้ IC 555 เป็น PWM Generator
ขั้นตอน 555 โดยทั่วไปจะทำหน้าที่เหมือนเครื่องกำเนิดไฟฟ้า PWM ซึ่งแตกต่างกันไปตามสัดส่วนเนื่องจากศักยภาพของพิน # 5 นั้นแตกต่างกันไป PWM ที่แตกต่างกันถูกสร้างขึ้นที่พิน # 3
โดยค่าเริ่มต้นพิน # 5 จะเชื่อมต่อกับตัวต้านทาน 1K กับกราวด์ซึ่งทำให้มั่นใจได้ว่าเมื่อไม่มีแรงดันไฟฟ้าหรือแรงดันไฟฟ้าต่ำสุดที่ขา # 5 จะส่งผลให้ PWM แคบมากที่ขา # 3 และเป็นศักย์หรือแรงดันไฟฟ้าที่ขา # 5 เพิ่มขึ้น PWM ยังได้รับความกว้างตามสัดส่วน ความกว้างสูงสุดเมื่อศักย์ที่พิน # 5 ถึง 2 / 3rd ของ Vcc ของพิน # 4/8
เห็นได้ชัดว่าเมื่อเอาต์พุตจาก IC 4017 เปลี่ยนการสร้างแรงดันไฟฟ้าที่แตกต่างกันที่ฐานของ NPN จำนวนแรงดันไฟฟ้าที่แตกต่างกันจะถูกถ่ายโอนผ่านพิน # 5 ของ IC 555 ซึ่งจะถูกแปลงเป็น PWM ที่เปลี่ยนแปลงตามขา # 3 ของ IC
เนื่องจากพิน # 3 ของ IC เชื่อมต่อกับเกตของไตรแอกการนำของไตรแอกจึงได้รับอิทธิพลตามสัดส่วนจากสูงไปต่ำและในทางกลับกันเพื่อตอบสนองต่อ PWM ที่เปลี่ยนแปลงไปบนเกต
สิ่งนี้ถูกแปลงอย่างมีประสิทธิภาพเป็นการควบคุมความเร็วที่ต้องการหรือการควบคุมที่เหมาะสมของพัดลมที่เชื่อมต่อผ่าน MT1 ของ Triac และอินพุตไฟ AC
ดังนั้นความเร็วของพัดลมจะปรับได้จากเร็วไปหาช้าและในทางกลับกันก็ตอบสนองต่อลำแสงอินฟราเรดอินฟราเรดที่สลับกับเซ็นเซอร์ IR ที่เกี่ยวข้องของวงจร
วิธีการตั้งค่าวงจร
อาจทำได้ด้วยความช่วยเหลือของขั้นตอนต่อไปนี้:
ในขั้นต้นให้ตัวปล่อยของทรานซิสเตอร์ BC547 ที่ตัดการเชื่อมต่อด้วยพิน # 5 ของ IC555
ตอนนี้ทั้งสองขั้นตอน (IC 4017 และ IC 555) สามารถสันนิษฐานได้ว่าแยกออกจากกัน
ขั้นแรกให้ตรวจสอบขั้นตอน IC 555 ในลักษณะต่อไปนี้:
การถอดตัวต้านทาน 1K ข้ามพิน # 5 และกราวด์ควรเพิ่มความเร็วของพัดลมให้สูงสุดและการเชื่อมต่อกลับควรลดลงเหลือต่ำสุด
ข้างต้นจะยืนยันการทำงานที่ถูกต้องของขั้นตอน IC 555 PWM
การตั้งค่าที่ตั้งไว้ล่วงหน้า 50k ไม่สำคัญและอาจตั้งไว้ที่กึ่งกลางของช่วงที่ตั้งไว้ล่วงหน้า
อย่างไรก็ตามสามารถทดลองตัวเก็บประจุ 1nF เพื่อให้ได้ผลลัพธ์ที่ดีที่สุด สามารถลองใช้ค่าที่สูงขึ้นได้ถึง 10uF และตรวจสอบผลลัพธ์เพื่อให้ได้การควบคุมความเร็วพัดลมที่ดีที่สุด
ต่อไปเราต้องตรวจสอบว่าโหนดเอาต์พุต IC 4017 ที่ 'A' สร้างแรงดันไฟฟ้าที่แตกต่างกันตั้งแต่ 1V ถึง 10V เพื่อตอบสนองต่อการกดลำแสงรีโมท IR แต่ละครั้งเหนือเซ็นเซอร์ IR ของวงจร
หากตรงตามเงื่อนไขข้างต้นเราสามารถสมมติว่าสเตจทำงานได้อย่างถูกต้องและตอนนี้ตัวปล่อยของ BC547 สามารถรวมเข้ากับพิน # 5 ของ IC555 สำหรับการทดสอบขั้นสุดท้ายของการควบคุมความเร็วพัดลมโดยใช้โทรศัพท์ระยะไกล IR
เครื่องโทรศัพท์ระยะไกลอาจเป็นรีโมทคอนโทรลของทีวีที่ปกติเราใช้ในบ้านของเรา
หากการออกแบบข้างต้นทำงานไม่ราบรื่นกับพัดลมที่เชื่อมต่ออาจต้องผ่านการปรับเปลี่ยนเล็กน้อยเพื่อปรับปรุงผลลัพธ์ดังที่แสดงด้านล่าง:

วงจรนี้ใช้ความช่วยเหลือของไดรเวอร์ MOC3031 triac เพื่อบังคับใช้การควบคุมพัดลมที่ไม่ยุ่งยากและสะอาดผ่านโทรศัพท์มือถือระยะไกล
การวิเคราะห์การทดสอบ
ในการทดสอบวงจรข้างต้นผลลัพธ์ไม่เป็นที่น่าพอใจนักเนื่องจากไม่สามารถควบคุมพัดลมได้ถึงขีด จำกัด ต่ำสุดและมีการสั่นสะเทือน
การวิเคราะห์การออกแบบพบว่าการใช้ PWM บน triac เป็นสาเหตุของปัญหาเนื่องจาก triacs ไม่ตอบสนองต่อ DC PWM ได้ดี แต่จะแสดงปฏิกิริยาที่ดีขึ้นต่อการสับเฟส AC ตามที่ใช้ในสวิตช์หรี่ไฟ
ใช้ Phase Control แทน PWM
วงจรที่กล่าวถึงในบทความนี้จะกำจัดแนวคิด PWM สำหรับการควบคุมการลดแสงของพัดลมแทนที่จะใช้ triacs พลังงานต่ำเพียงไม่กี่ตัวสำหรับการใช้เอฟเฟกต์การลดแสงหรือการเร่งความเร็วตามลำดับบนมอเตอร์พัดลมที่เชื่อมต่อ
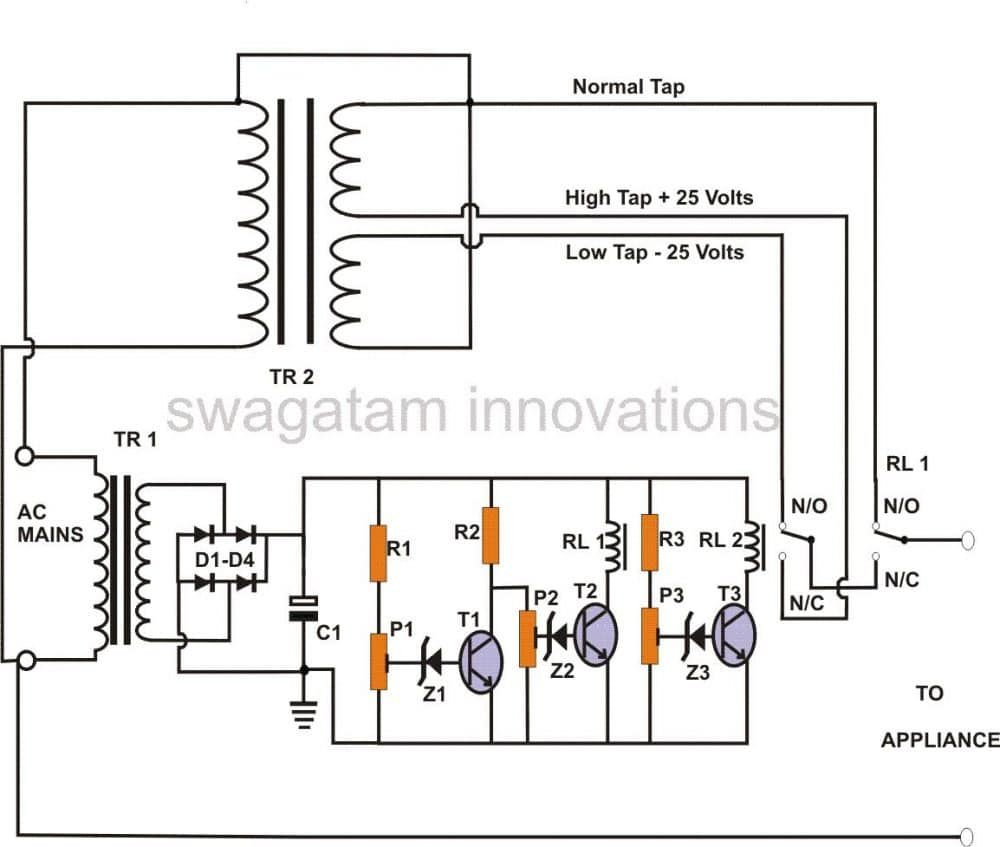
การออกแบบที่สมบูรณ์สำหรับวงจรหรี่พัดลมควบคุมระยะไกลที่นำเสนอสามารถดูได้ด้านล่าง:
แผนภูมิวงจรรวม

หมายเหตุ: SCR ทั้ง 4 แสดงเป็น SCR BT169 ไม่ถูกต้องสิ่งเหล่านี้จะต้องถูกแทนที่ด้วยไตรแอกเช่น BCR1AM-8P ไตรแอกหรือไตรแอกอื่น ๆ ที่คล้ายกันก็จะทำเช่นกัน
มันทำงานอย่างไร
เมื่ออ้างถึงแผนภาพด้านบนเราจะเห็นสองวงจรที่กำหนดค่าไว้ในสองขั้นตอนที่แตกต่างกัน
ด้านขวาของแผนภาพถูกกำหนดค่าเป็นไฟล์ ไฟหรี่มาตรฐานหรือวงจรหรี่พัดลม ยกเว้นการเปลี่ยนแปลงหนึ่งรายการซึ่งสามารถเห็นได้ใกล้กับส่วนของหม้อตามปกติซึ่งจะถูกแทนที่ด้วย triacs สี่ตัวที่มีตัวต้านทานแยกกันสี่ตัวที่ MT2 ซึ่งจัดเรียงด้วยค่าที่เพิ่มขึ้น
ขั้นตอนด้านซ้ายที่ประกอบด้วย IC 4017 มีการต่อสายเป็นเครื่องกำเนิดลอจิกตามลำดับ 4 ขั้นตอนที่เรียกใช้โดยหน่วยเซ็นเซอร์อินฟราเรดซึ่งเป็นตัวรับสัญญาณ IR สำหรับรับทริกเกอร์การสลับจากชุดควบคุมระยะไกล IR ที่ถือด้วยมือ
ทางเลือก ลำแสง IR ระยะไกลจากเครื่องส่งสัญญาณ IR ทำให้ IRS สร้างพัลส์สลับที่พิน # 14 ของ IC 4017 ซึ่งจะแปลงพัลส์เป็นพัลส์สูงแบบลอจิกตามลำดับข้ามพิน # 3 เป็นพิน # 10 หลังจากนั้นจะรีเซ็ตกลับเป็นพิน # 3 ผ่านพิน ปฏิสัมพันธ์ # 1/15
พินข้างต้นซึ่งรับผิดชอบในการสร้างพัลส์สูงลอจิกการเดินทางตามลำดับจะเชื่อมต่อกับประตู A, B, C, D ของไตรแอกที่ระบุ
เนื่องจากตัวต้านทานที่เชื่อมต่อกับแอโนดของไตรแอกกลายเป็นส่วนประกอบที่กำหนดสำหรับขีด จำกัด ความเร็วของพัดลมหมายความว่าโดยการสลับไตรแอกไปมาตามลำดับความเร็วของพัดลมสามารถเพิ่มขึ้นหรือลดลงตามสัดส่วนใน 4 ขั้นตอนแยกกันขึ้นอยู่กับ ค่าของ R4 ---- R8
ดังนั้นเมื่อกดปุ่มโทรศัพท์ระยะไกล IC 4017 pinouts จะเรียกไตรแอคที่เกี่ยวข้องซึ่งจะเชื่อมต่อตัวต้านทานขั้วบวกกับการกำหนดค่าไตรแอค / ไดแอกแบบหรี่โดยเรียกใช้ความเร็วพัดลมที่เกี่ยวข้อง
ในวงจรหรี่พัดลมควบคุมระยะไกลที่นำเสนอจะมีการแสดงไตรแอก 4 ตัวเพื่อสร้างการควบคุมความเร็ว 4 ขั้นตอนอย่างไรก็ตาม 10 ไตรแอกดังกล่าวสามารถใช้งานได้กับ 10 pinouts ทั้งหมดของ IC 4017 เพื่อให้ได้การควบคุมความเร็วพัดลมที่ควบคุมอย่างดี 10 ขั้นตอน
ส่วนรายการ
R1, R3 = 100 โอห์ม, R2 = 100K, R4 = 4K7, R5 = 10K,
C2 = 47uF / 25VC1, C4 = 22uF / 25V, C6 = 4.7uF / 25V,
C3 = 0.1, เซรามิก
C5 = 100uF / 50V
C10 = 0.22uF / 400V
T1 = BC557
กรมสรรพากร = เซ็นเซอร์ TSOP IR
IC1 = 4017 ไอซี
D1 = 1N4007
D2 = ซีเนอร์ 12V 1 วัตต์
R9 = 15K
R10 = 330K
R4 --- R8 = 50K, 100K. 150K, 220K
R11 = 33K
R12 = 100 โอห์ม
Diac = DB-3
TR1 = BT136
L1 = 500 รอบของ 28SWG เหนือสลักเกลียวเหล็กใด ๆ
C7 = 0.1uF / 600V
คำเตือน: วงจรทั้งหมดเชื่อมโยงโดยตรงกับ AC หลักตรวจสอบข้อควรระวังอย่างยิ่งในขณะที่ทดสอบวงจรในตำแหน่งที่มีการจ่ายไฟ
คู่ของ: Toy Motor Circuit พร้อม Timed Reverse Forward Action ถัดไป: วงจรควบคุมตัวจับเวลาวาล์วน้ำ