โดรนได้กลายเป็นหนึ่งในเทคโนโลยีที่น่าตื่นเต้นที่สุดในยุคสมัยใหม่อย่างน่ารักนักดนตรีมือสมัครเล่นวิศวกรผู้สร้างภาพยนตร์และแม้แต่เกษตรกร ไม่ว่าคุณจะเป็นมือใหม่เพียงแค่เริ่มสำรวจโลกของยานพาหนะทางอากาศที่ไม่มีคนขับ (UAVs) หรือมีคนอยากรู้ว่าเสียงพึมพำทำงานอย่างไรบทช่วยสอนนี้จะให้รากฐานที่มั่นคง
เสียงพึมพำคืออะไร?
เสียงพึมพำหรือที่รู้จักกันในชื่อ UAV (ยานพาหนะทางอากาศที่ไม่มีคนขับ) เป็นเครื่องบินที่ทำงานโดยไม่มีนักบินมนุษย์บนเรือ มันถูกควบคุมโดยบุคคลที่ใช้คอนโทรลเลอร์หรืออัตโนมัติผ่านเส้นทางเที่ยวบินที่ตั้งโปรแกรมไว้ล่วงหน้าและคอมพิวเตอร์ออนบอร์ด โดรนมีหลายรูปร่างและขนาด แต่ประเภทที่พบบ่อยที่สุดสำหรับผู้เริ่มต้นคือ quadcopter - เสียงพึมพำกับใบพัดสี่ใบ

ส่วนประกอบพื้นฐานของเสียงพึมพำ
มาทำลายส่วนสำคัญของโดรน quadcopter ทั่วไปและเข้าใจบทบาทของพวกเขา:
กรอบ
- วัตถุประสงค์: โครงกระดูกหรือแชสซีที่เก็บส่วนประกอบอื่น ๆ ทั้งหมดเข้าด้วยกัน
- วัสดุ: มักจะทำจากวัสดุที่มีน้ำหนักเบาเช่นคาร์บอนไฟเบอร์หรือพลาสติก
- ออกแบบ: ต้องแข็งแกร่งพอที่จะจัดการกับการสั่นสะเทือนการลงจอดและการชนเล็กน้อย

ใบพัด
- การทำงาน: แปลงการหมุนมอเตอร์เป็นลิฟท์โดยการหมุนและผลักอากาศลง
- ประเภท: ตามเข็มนาฬิกา (CW) และทวนเข็มนาฬิกา (CCW) เพื่อรักษาเสถียรภาพ
- บันทึก: ขนาดใบพัดและระดับเสียงส่งผลกระทบต่อวิธีที่เสียงพึมพำจับและเร็วแค่ไหนที่จะไปได้

โปรดดูลิงค์นี้เพื่อเรียนรู้เพิ่มเติมเกี่ยวกับไฟล์ ใบพัด -
มอเตอร์
- พิมพ์: โดยทั่วไปแล้วมอเตอร์ DC ที่ไร้แปรงเพื่อประสิทธิภาพและความทนทานที่สูงขึ้น
- บทบาท: หมุนใบพัดด้วยความเร็วสูงเพื่อสร้างการยกและอนุญาตให้มีการหลบหลีก
- มอเตอร์แต่ละตัวจะถูกจับคู่กับทิศทางใบพัดเฉพาะ (CW หรือ CCW)

Flight Controller (FC)
- 'สมอง' ของเสียงพึมพำ
- ประมวลผลข้อมูลจากเซ็นเซอร์ (ไจโร, accelerometer, เข็มทิศ) และควบคุมมอเตอร์
- ตัดสินใจเกี่ยวกับความมั่นคงความสมดุลและคำสั่งของผู้ใช้จากตัวควบคุมระยะไกล

ตัวควบคุมความเร็วอิเล็กทรอนิกส์ (ESCs)
- ควบคุมว่าแต่ละมอเตอร์หมุนเร็วแค่ไหน
- ใช้คำสั่งจากคอนโทรลเลอร์เที่ยวบินและปรับพลังงานที่ส่งไปยังมอเตอร์แต่ละตัว
- สำคัญสำหรับการควบคุมทิศทางความสมดุลและความเร็ว

แบตเตอรี่
- ใช้พลังงานอิเล็กทรอนิกส์ทั้งหมดบนเสียงพึมพำ
- มักจะเป็นแบตเตอรี่ Lipo (ลิเธียมพอลิเมอร์) ซึ่งรู้จักกันดีในเรื่องความหนาแน่นของพลังงานสูง
- ขนาดแบตเตอรี่มีผลต่อเวลาบินและน้ำหนักเสียงพึมพำ

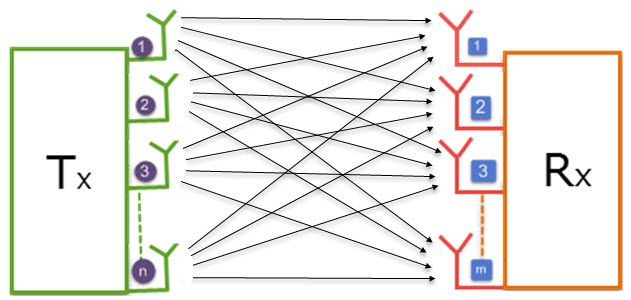
เครื่องส่งสัญญาณและตัวรับสัญญาณ
- เครื่องส่งสัญญาณ (TX): รีโมทควบคุมในมือของคุณ
- ตัวรับสัญญาณ (RX): ติดกับเสียงพึมพำรับสัญญาณจากเครื่องส่งสัญญาณ
- ใช้ในการควบคุมการเคลื่อนไหวของเสียงพึมพำด้วยตนเอง (คันเร่ง, พิทช์, หันเห, ม้วน)

โมดูล GPS (เป็นทางเลือก แต่พบได้ทั่วไป)
- อนุญาตให้มีคุณสมบัติเช่น Return-to-Home (RTH) เส้นทางการบินอิสระและการนำทางที่แม่นยำ
- จำเป็นสำหรับเที่ยวบินไกลหรือเที่ยวบินกลางแจ้ง

กล้อง (ไม่บังคับ)
- ใช้สำหรับการถ่ายภาพ, FPV (มุมมองคนแรก) หรือแอพพลิเคชั่นการมองเห็นคอมพิวเตอร์
- สามารถเป็นแบบอะนาล็อก (สำหรับการแข่งรถ FPV) หรือดิจิตอล (สำหรับการถ่ายภาพและวิดีโอความละเอียดสูง)

ฟังก์ชั่น
แต่ละองค์ประกอบของเสียงพึมพำและวัตถุประสงค์มีการกล่าวถึงด้านล่าง

|
ส่วนประกอบ |
วัตถุประสงค์ |
|
กรอบ |
ถือทุกอย่างเข้าด้วยกัน |
|
ใบพัด |
สร้างลิฟท์ |
|
มอเตอร์ |
ขับเคลื่อนใบพัด |
|
ESCS |
ควบคุมความเร็วมอเตอร์ |
|
ตัวควบคุมเที่ยวบิน |
ทำหน้าที่เป็นสมอง |
|
แบตเตอรี่ |
พลังระบบ |
|
TX/RX |
การสื่อสารระหว่างผู้ใช้และเสียงพึมพำ |
|
GPS |
การนำทางและเที่ยวบินอิสระ |
| กล้อง |
จับภาพวิดีโอ/รูปภาพ (ถ้าติดตั้ง) |
ชิ้นส่วนเหล่านี้ทำงานร่วมกันได้อย่างไร?
- เมื่อคุณดันจอยสติ๊กบนคอนโทรลเลอร์:
- เครื่องส่งสัญญาณส่งคำสั่งของคุณไปยังผู้รับ
- ตัวควบคุมเที่ยวบินประมวลผลคำสั่งและปรับความเร็วของมอเตอร์แต่ละตัวผ่านทาง ESC
- ใบพัดหมุนตามนั้นเปลี่ยนตำแหน่งของเสียงพึมพำ (ขึ้นลงหมุนเอียง)
- หาก GPS เปิดใช้งานโดรนก็ใช้ข้อมูลดาวเทียมสำหรับโฮเวอร์และการนำทางที่เสถียร
โดรนใช้ที่ไหน?
โดรนใช้ในอุตสาหกรรมและแอพพลิเคชั่นที่หลากหลาย:
- การถ่ายภาพทางอากาศและวิดีโอ
- การเกษตร (การตรวจสอบการเพาะปลูกและการฉีดพ่น)
- การจัดส่งและโลจิสติกส์
- การทำแผนที่และการสำรวจ
- การเฝ้าระวังทางทหาร
- ค้นหาและช่วยเหลือ
- งานอดิเรกบินและแข่งรถ
- ใช้ทำ โครงการโดรน -
นี่คือไฟล์ ภาพรวมของเสียงพึมพำ หรือยานพาหนะทางอากาศที่ไม่มีคนขับ - คู่มือผู้เริ่มต้นเกี่ยวกับพื้นฐานและส่วนประกอบ ในขณะที่การวิจัยและพัฒนาดำเนินต่อไปโดรนถูกตั้งค่าให้กลายเป็นเครื่องมือที่หลากหลายมีประสิทธิภาพและขาดไม่ได้สำหรับอนาคต