
ความตายเป็นสิ่งที่หลีกเลี่ยงไม่ได้ แต่การเสียชีวิตอย่างกะทันหันเพียงเพราะอุบัติเหตุบนท้องถนนหรือที่เลวร้ายที่สุดนั่นคือการบาดเจ็บที่อาจทำให้ชีวิตของคนเราแย่ลงไปตลอดกาล มันไม่ส่งอาการสั่นลงกระดูกสันหลังของคุณเพียงแค่คิดเกี่ยวกับเรื่องนี้? สาเหตุสำคัญที่อยู่เบื้องหลังอุบัติเหตุคืออะไร? แน่นอนว่าการขับขี่โดยประมาทและการขับขี่ยานพาหนะโดยเฉพาะบนทางเรียบเช่นบนทางสูง
ตามรายงานทางสถิติในช่วงปี 2548-2552 มีผู้เสียชีวิตประมาณ 1200 รายเนื่องจากอุบัติเหตุเนื่องจากการขับรถที่มีผื่น และยิ่งไปกว่านั้นคุณสามารถรับฟังข่าวอุบัติเหตุเนื่องจากคนขับรถเป็นผื่นเกือบทุกวัน
แล้วมีวิธีป้องกันอย่างไร? แน่นอน!
อาจมีหลายวิธีเช่นการเป็นผู้ขับขี่ที่ดีและปฏิบัติตามกฎจราจรรักษาความเร็วปกติ แต่มีวิธีหนึ่งที่สำคัญนั่นคือการเฝ้าระวังความเร็วของรถและตรวจสอบตามนั้น
สิ่งนี้สามารถทำได้โดยการหาวิธีตรวจสอบความเร็วของรถ
2 วิธีในการตรวจสอบความเร็ว:
- การติดตั้งเซ็นเซอร์ความเร็วที่ข้างถนนหรือตรงกลางถนน .
- รวมโปรเซสเซอร์ภาพวิดีโอ : ประกอบด้วยกล้องที่ติดตั้งบนเสาของริมถนนซึ่งจะตรวจสอบสถานการณ์อย่างต่อเนื่องโดยการถ่ายภาพในเฟรมที่ต่อเนื่องกันอย่างรวดเร็ว พารามิเตอร์การรับส่งข้อมูลจะถูกวิเคราะห์และประมวลผลตามในตัวประมวลผลสัญญาณ

ภาพแสดงการตรวจสอบการจราจรด้วยกล้องวิดีโอ
- รวม RADAR ไว้บนเลน :RADAR สามารถใช้เพื่อตรวจสอบความเร็วของรถได้โดยการส่งสัญญาณในย่านความถี่ไมโครเวฟไปยังรถและวิเคราะห์การเปลี่ยนแปลงความถี่ของสัญญาณสะท้อน RADAR ย่อมาจาก Radio Detection and Ranging สัญญาณที่ส่งอาจเป็นสัญญาณที่มีความถี่คงที่หรือความถี่ที่เปลี่ยนแปลง โดยปกติจะมีการติดตั้ง CW Doppler RADAR ไว้ที่เสาข้างถนน

การตรวจจับความเร็วโดยใช้ RADAR
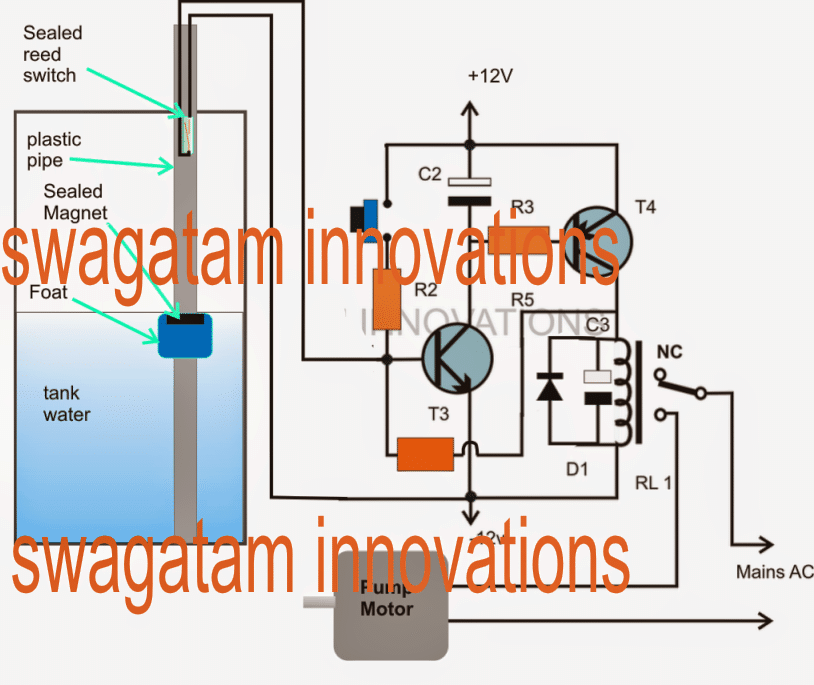
- การติดตั้งเซ็นเซอร์ IR : เซ็นเซอร์ IR ที่มี IR LED และโฟโตไดโอดร่วมกันสามารถใช้เพื่อตรวจสอบระยะทางที่ยานพาหนะเดินทางและคำนวณความเร็วไปพร้อม ๆ กัน แนวคิดพื้นฐานคือการวางคู่ของ IR LED และโฟโตไดโอดเป็นระยะ ๆ ที่ด้านใดด้านหนึ่งของถนนและตรวจสอบการหยุดชะงักของเส้นทางระหว่าง IR LED และโฟโตไดโอดข้างรถ
นี่คือต้นแบบง่ายๆของวิธีการข้างต้น ต้นแบบตัวอย่างทำงานร่วมกับโฟโตไดโอด IRLED สองคู่

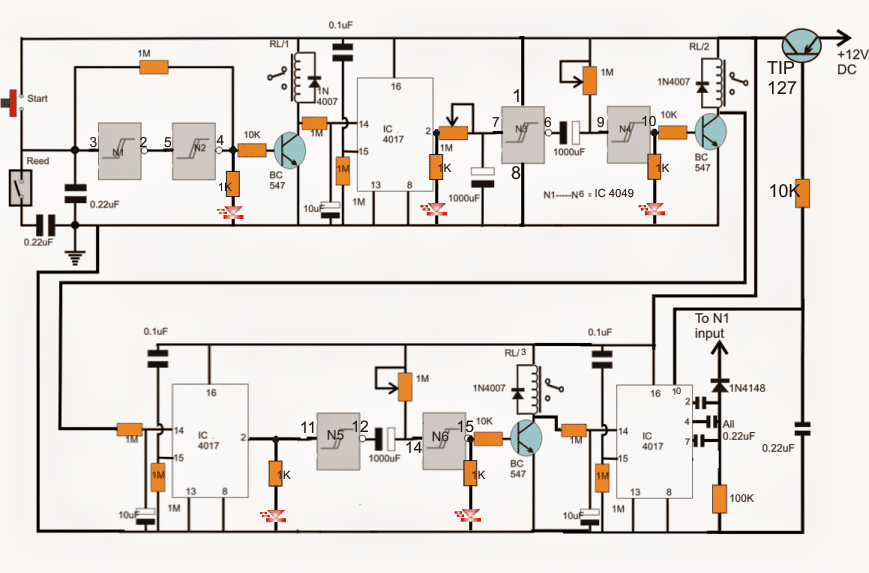
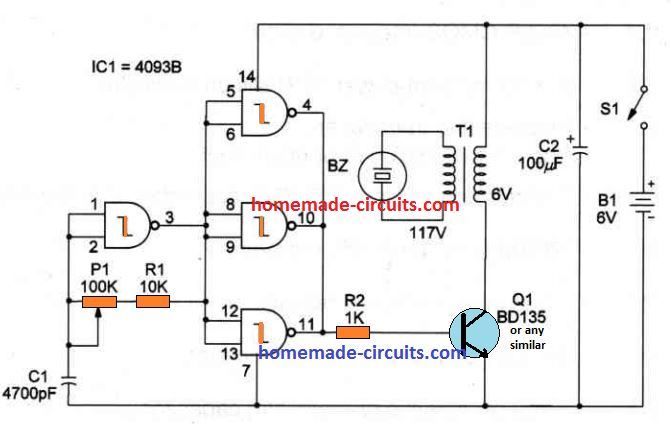
วงจรต้นแบบตรวจสอบความเร็วโดยใช้เซ็นเซอร์ IR โดย ชุด Edgefx
ประกอบด้วยส่วนต่อไปนี้:
- โฟโตไดโอด - LED จับคู่เพื่อตรวจจับยานพาหนะ
- ตัวนับเพื่อนับและแสดงเวลาที่ยานพาหนะใช้เพื่อข้ามเส้นทางระหว่างคู่โฟโตไดโอดที่นำโดยโฟโตไดโอด
- เสียงกริ่งเพื่อระบุว่าความเร็วเกินขีด จำกัด ที่ตั้งไว้หรือไม่
- Timer ICs เพื่อให้สัญญาณในช่วงเวลาที่เหมาะสม
- ใช้ปืน LIDAR : LIDAR เป็นระบบการตรวจจับและระยะห่างที่ใช้ LASER ตำรวจจราจรสามารถพกปืน LIDAR แบบพกพาซึ่งส่งแสงอินฟราเรดสั้น ๆ ออกมาและเมื่อแสงนี้สะท้อนกลับจากยานพาหนะที่กำลังเคลื่อนที่ปืนจะบันทึกเวลาที่สัญญาณสะท้อนกลับมาและหารด้วยสองเพื่อวัด ระยะทาง. ความเร็ววัดได้จากการหารจำนวนตัวอย่างด้วยระยะเวลาคงที่ไม่กี่วินาที ทำงานคล้ายกับระบบ RADAR ยกเว้นว่าจะใช้คลื่นแสงแทนคลื่นวิทยุ

ปืน LIDAR อยู่ในมือของตำรวจจราจร
การทำงานของระบบตรวจสอบความเร็วโดยใช้เซนเซอร์ IR

แผนภาพบล็อกแสดงการทำงานของระบบตรวจสอบความเร็วโดยใช้เซนเซอร์ IR โดย ชุด Edgefx
เมื่อยานพาหนะข้ามเส้นทางระหว่าง IRLED-Photodiode คู่แรกมันจะบล็อกทางของแสงและความต้านทานโฟโตไดโอดจะเพิ่มขึ้นทำให้สัญญาณเอาต์พุตต่ำที่สอดคล้องกันไปยังตัวจับเวลา IC1 ตัวจับเวลา IC1 สร้างสัญญาณสูงที่เอาต์พุตเป็นระยะเวลาคงที่ 10ms ในสภาวะปกติที่ความเร็วปกติจะไม่มีการหยุดชะงักในเส้นทางระหว่าง 2ndคู่โฟโตไดโอด - IR LED และอินพุตที่สอดคล้องกับตัวจับเวลา IC2 จะสูงทำให้สัญญาณลอจิกต่ำที่เอาต์พุต เอาต์พุตจากตัวจับเวลาทั้งสองเชื่อมต่อกับ NAND gate 2m ซึ่งให้เอาต์พุตสูง (สำหรับอินพุตต่ำและสูง) เชื่อมต่อกับอินพุตของตัวจับเวลา IC3 เอาต์พุตที่สอดคล้องกันของ IC จับเวลาอยู่ในระดับต่ำทำให้ออดอยู่ในสภาพปิด ในเวลาเดียวกันเอาต์พุตจากตัวจับเวลา IC1 จะถูกกำหนดให้กับอินพุตทั้งสองของ NAND gate1 ซึ่งให้เอาต์พุตลอจิกต่ำซึ่งมอบให้กับตัวจับเวลา IC4 เพื่อให้เอาต์พุตลอจิกสูงเชื่อมต่อกับพินรีเซ็ตของตัวจับเวลา IC5 เอาต์พุตของตัวจับเวลา IC5 มีค่าสูงตามลำดับโดยให้พัลส์สูงไปยัง IC ตัวนับ ส่วน Counter ประกอบด้วย Decade Counters 4 ขั้นตอนเพื่ออ่านจำนวนตัวเลขหลายหลัก นาฬิกา IC ตัวนับแต่ละตัวเชื่อมต่อกับเอาต์พุตนาฬิกาของ IC ตัวนับก่อนหน้า ตัวนับจะเพิ่มจำนวนในแต่ละขอบที่เพิ่มขึ้นของชีพจรนาฬิกา
ตอนนี้สมมติว่ายานพาหนะเคลื่อนที่ด้วยความเร็วสูงจนมาถึงเส้นทางระหว่างคู่โฟโตไดโอด IRLED ที่สองในระยะเวลาที่กำหนดไว้สำหรับตัวจับเวลา IC1 ดังนั้นตอนนี้ตัวนับจะแสดงจำนวนที่ต่ำกว่าการนับปกติและในเวลาเดียวกันเนื่องจาก NAND gate2 จะสูงที่อินพุตทั้งสองเอาต์พุตจึงต่ำและตามลำดับ IC3 ตัวจับเวลาจะรับอินพุตต่ำเพื่อให้เอาต์พุตลอจิกสูงและตามนั้น ทริกเกอร์เสียงปลุก
ดังนั้นระยะห่างระหว่างทั้งสองคู่หารด้วยการอ่านค่าตัวนับจะทำให้ความเร็วของรถและถ้าความเร็วนี้เพิ่มขึ้นถึงขีด จำกัด ที่กำหนดเสียงกริ่งจะดังขึ้นเพื่อบ่งชี้ที่ชัดเจนว่ามีการละเมิดขีด จำกัด ความเร็ว
ฉันได้ให้คำอธิบายโดยละเอียดเกี่ยวกับวิธีใดวิธีหนึ่ง วิธีอื่นใดยินดีรับเป็นข้อเสนอแนะ
เครดิตภาพ:
- ตำรวจจราจรพร้อมปืน LIDAR โดย วิกิมีเดีย





{kind=link}