การออกแบบและควบคุมต้นแบบรถไฟอัตโนมัติ
ทุกคนในเมืองรถไฟใต้ดินเช่นโกลกาตาเดลีเพลิดเพลินกับความหรูหราของรถไฟใต้ดินเคยคิดเกี่ยวกับรถไฟหรือไม่? ไม่ฉันจะให้ความคิดสั้น ๆ เกี่ยวกับรถไฟที่ขับเคลื่อนและควบคุมอัตโนมัติแบบไม่มีคนขับ แต่ก่อนหน้านั้นให้เราจำสั้น ๆ เกี่ยวกับประเภทของ รถไฟใต้ดินอัตโนมัติ .
โหมดควบคุมไดรเวอร์ : ในโหมดปกติผู้ขับขี่แบบแมนนวลที่ขับเคลื่อนรถไฟและควบคุมการเคลื่อนที่ของรถไฟโดยใช้สัญญาณไฟที่หยุดนิ่ง
โหมดอัตโนมัติบางส่วน : ในโหมดนี้ไดรเวอร์จะขับเคลื่อน รถไฟ ในขณะที่ระบบควบคุมภายนอกใช้เพื่อตรวจสอบความเร็วและความเร่งของรถไฟอย่างต่อเนื่องและให้ข้อเสนอแนะที่จำเป็นแก่ผู้ขับขี่
โหมดไร้คนขับ : การดำเนินการและบำรุงรักษารถไฟทั้งหมดจะดำเนินการโดยอัตโนมัติโดยไม่มีการแทรกแซงจากมนุษย์ รถไฟจะหยุดและเริ่มโดยอัตโนมัติและประตูจะปิดและเปิดโดยอัตโนมัติ
ดังนั้นตอนนี้ให้เรามุ่งเน้นไปที่โหมดสุดท้ายนั่นคือโหมดไร้คนขับ
ในรถไฟที่ไม่มีคนขับอัตโนมัติการควบคุมจะกระทำผ่านการควบคุมรถไฟที่ใช้การสื่อสารซึ่งใช้คอมพิวเตอร์ติดตามเพื่อตรวจสอบรถไฟที่วิ่งบนเส้นทางที่กำหนดและถ่ายทอดข้อมูลนี้ไปยังคอมพิวเตอร์ส่วนกลาง รถไฟถูกควบคุมโดยระบบควบคุมรถไฟอัตโนมัติ
การออกแบบต้นแบบพื้นฐานของรถไฟไร้คนขับอัตโนมัติ
การออกแบบจะมีส่วนประกอบดังต่อไปนี้:
- ตัวเครื่องทรงสี่เหลี่ยมที่มีส่วนอื่น ๆ ส่วนประกอบของหุ่นยนต์ เช่นวงจรควบคุมประตู ฯลฯ
- ต้นแบบประตูบานเลื่อน
- การจัดเรียง IR LED และโฟโตไดโอด
- วงจรควบคุมโดยใช้ไมโครคอนโทรลเลอร์
การทำงานของต้นแบบพื้นฐาน:
ดังนั้นให้เราดูว่าต้นแบบพื้นฐานของเราทำงานอย่างไร:
- ระบบตรวจจับแพลตฟอร์มอัตโนมัติและระบบควบคุมประตู : ประกอบด้วย IR LED และระบบโฟโตไดโอด เมื่อเซ็นเซอร์ตรวจจับการมาของสถานีคนขับมอเตอร์จะขับมอเตอร์โดยอัตโนมัติเพื่อให้รถไฟหยุดและประตูจะเปิดเมื่อมีคนรู้สึกตัว
- ระบบเคาน์เตอร์ผู้โดยสาร : รถไฟยังติดตั้งระบบเคาน์เตอร์ผู้โดยสารซึ่งจะนับจำนวนผู้โดยสารที่เข้ามาในรถไฟและเมื่อนับถึงขีด จำกัด ประตูจะปิดโดยอัตโนมัติและรถไฟจะเริ่มเคลื่อนตัวหลังจากเวลาที่กำหนด
วิธีควบคุม Train Prototype:
- การควบคุมการเคลื่อนที่ของรถไฟ : โดยปกติเมื่อรถไฟเคลื่อนที่การจัดเรียงโฟโตไดโอด IR LED จะถูกวางไว้ในลักษณะที่ทั้งสองวางขนานกันดังนั้นโฟโตไดโอดไม่ได้รับแสงพัลส์จึงไม่ทำงานและส่งผลให้ไมโครคอนโทรลเลอร์ จะได้รับสัญญาณสูง ขณะที่รถไฟเข้าใกล้สถานีไฟ IR จาก IR LED จะสะท้อนโดยวัตถุใด ๆ (สมมติว่าเป็นสัญญาณของสถานี) และแสงสะท้อนจะตกบนโฟโตไดโอดทำให้เกิดการทำงานและสัญญาณรบกวนต่ำจะถูกส่งไปยังไมโครคอนโทรลเลอร์ ผ่านทรานซิสเตอร์ ไมโครคอนโทรลเลอร์ถูกตั้งโปรแกรมให้ส่งสัญญาณไปยังตัวขับมอเตอร์เพื่อหยุดการทำงานของมอเตอร์ การทำงานของมอเตอร์ขับเคลื่อนด้วย IC ขับมอเตอร์ที่นี่สองสถานีเชื่อมต่อกับไมโครคอนโทรลเลอร์ผ่านมอเตอร์ไดรฟ์
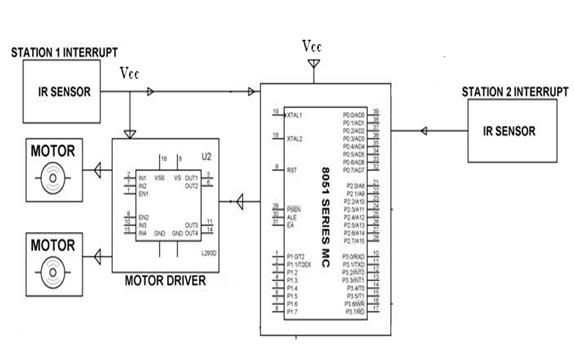
แผนภาพบล็อกแสดงการควบคุมการเคลื่อนที่ของรถไฟ

- การควบคุมการเปิดและปิดประตู : ขณะที่รถไฟหยุดกล่าวคือไมโครคอนโทรลเลอร์จะส่งสัญญาณขัดจังหวะไปยังตัวขับมอเตอร์เพื่อหยุดมอเตอร์ไมโครคอนโทรลเลอร์จะส่งสัญญาณสูงไปยังตัวขับมอเตอร์ประตูเพื่อให้มอเตอร์เปิดประตูเพื่อให้ผู้โดยสารเข้าไป ไมโครคอนโทรลเลอร์ถูกตั้งโปรแกรมให้ประตูเปิดออกจนกระทั่งจำนวนผู้โดยสารที่เข้ามาถึงขีด จำกัด จากนั้นไมโครคอนโทรลเลอร์จะถูกตั้งโปรแกรมให้ส่งสัญญาณให้คนขับมอเตอร์หมุนมอเตอร์เพื่อปิดประตู ไมโครคอนโทรลเลอร์เก็บรหัสซึ่งเขียนด้วยภาษาแอสเซมบลี ดังนั้นในการถ่ายโอนโปรแกรมที่เข้ารหัสนี้ไปยัง IC ไมโครคอนโทรลเลอร์เราจำเป็นต้องมีอุปกรณ์ที่เรียกว่าเครื่องเขียนหรือโปรแกรมเมอร์ โปรแกรมเมอร์คืออุปกรณ์ฮาร์ดแวร์ที่มีซอฟต์แวร์ที่อ่านเนื้อหาของไฟล์ฐานสิบหกซึ่งเก็บไว้ในพีซีหรือแล็ปท็อป มันอ่านข้อมูลไฟล์ hex แบบอนุกรมหรือสาย USB และถ่ายโอนข้อมูลไปยังหน่วยความจำของไมโครคอนโทรลเลอร์ โปรแกรมเมอร์และคอมไพเลอร์แตกต่างกันไปสำหรับไมโครคอนโทรลเลอร์ที่แตกต่างกันซึ่งมีไว้สำหรับ บริษัท ต่างๆเช่นไมโครคอนโทรลเลอร์ 8051 'แฟลชเมจิก' ใช้ในการตั้งโปรแกรมไมโครคอนโทรลเลอร์และไมโครคอนโทรลเลอร์ AT89C51 ที่ 'โปรแกรมเมอร์' ใช้ในการตั้งโปรแกรมไมโครคอนโทรลเลอร์ นี่เป็นวิธีการเขียนโปรแกรมโค้ดในไมโครคอนโทรลเลอร์ด้วยเครื่องเขียนหรือโปรแกรมเมอร์

แผนภาพบล็อกแสดงการควบคุมการเปิดและปิดประตู
- การควบคุมจำนวนผู้โดยสารที่เข้าและออกจากรถไฟ : ทำได้โดยใช้ระบบเคาน์เตอร์ผู้โดยสาร อีกครั้งประกอบด้วยการจัดเรียงโฟโตไดโอด IR LED - อีกอันหนึ่งอยู่ที่ประตูและห่างออกไปอีกเล็กน้อย เมื่อบุคคลเข้ามาในประตูจะมีการขัดจังหวะระหว่าง IR LED และโฟโตไดโอดดังนั้นทรานซิสเตอร์ที่เกี่ยวข้องจะส่งสัญญาณลอจิกสูงไปยังไมโครคอนโทรลเลอร์ เมื่อบุคคลนั้นออกจากพื้นที่และเข้าไปข้างในมากขึ้นเพื่อขัดจังหวะการจัดเรียง IR LED-Photodiode ที่สอง 1เซนต์การจัดเรียง IR LED-Photodiode กลับมาทำงานตามปกติและสัญญาณต่ำจะถูกส่งจากทรานซิสเตอร์ที่เกี่ยวข้องไปยังไมโครคอนโทรลเลอร์ การเปลี่ยนจากสูงไปต่ำของขาไมโครคอนโทรลเลอร์นี้ทำให้การแสดงตัวเลขของการแสดง 7 ส่วนเพิ่มขึ้นโดยใช้โปรแกรม เมื่อการนับถึงค่าสูงสุดไมโครคอนโทรลเลอร์จะถูกตั้งโปรแกรมให้ส่งเสียงเตือน ในทำนองเดียวกันเมื่อเกิดการขัดจังหวะระหว่าง 2ndการจัดเรียง IRLED-Photodiode การเปลี่ยนจากสัญญาณสูงไปต่ำของไมโครคอนโทรลเลอร์ทำให้จำนวนการแสดงผล 7 ส่วนที่สองลดลง

แผนภาพบล็อกแสดงการควบคุมระบบการนับ
ข้อดีของระบบควบคุมรถไฟอัตโนมัติ:
- วิธีง่ายๆในการขนส่งจากและไปยังพื้นที่ห่างไกล
- รถไฟปรับอากาศ
- การใช้ระบบรถไฟอัตโนมัติทำให้เราเดินทางได้อย่างปลอดภัย
- เทคโนโลยีความเร็วสูง
- ความทันสมัย
- การเข้าถึง
ข้อเสียของระบบควบคุมรถไฟอัตโนมัติ:
- เเพง
- การรบกวน
- สูญเสียการควบคุม
ตอนนี้ฉันได้ออกแบบต้นแบบพื้นฐานแล้วเพียงแค่คิดว่ารถไฟใต้ดินอัตโนมัติในประเทศของเราควบคุมอย่างไร?