โพสต์กล่าวถึงตัวควบคุมความเร็วรอบเครื่องยนต์แบบอิเล็กทรอนิกส์หรือวงจรควบคุมโดยใช้สัญญาณตอบรับ RPM วนรอบผ่านเครือข่ายเซ็นเซอร์เอฟเฟกต์ฮอลล์ ไอเดียนี้ขอโดยคุณอิมสานาค
วัตถุประสงค์และข้อกำหนดของวงจร
- ขอบคุณมากสำหรับเวลาของคุณ. ฉันเชื่อว่าวงจรนี้จะเหมาะสำหรับการจ่ายไฟเฟสเดียว เครื่องกำเนิดไฟฟ้ากระแสสลับของฉันคือ 3 เฟส 7KvA และฉันต้องการจับคู่กับเครื่องยนต์ดีเซลที่มีคันเร่งแทนตัวควบคุมความเร็ว
- สิ่งที่ฉันต้องการจะนำไปใช้คือ - 'ELECTRONIC ENGINE SPEED GOVERNOR' ซึ่งอาจมีกลไกควบคุมเซอร์โวแบบอิเล็กทรอนิกส์เช่น - วงจรเซ็นเซอร์ความเร็ว (เซ็นเซอร์รอบเครื่องยนต์) เพื่อขับเคลื่อนเซอร์โวมอเตอร์เพื่อกระตุ้นกลไกการเร่งเพื่อรักษา ความเร็วคงที่ของเครื่องยนต์เมื่อเทียบกับภาระที่ใช้กับเครื่องกำเนิดไฟฟ้ากระแสสลับ
- สิ่งนี้จะช่วยในการรักษาความถี่และแรงดันไฟฟ้าของเครื่องกำเนิดไฟฟ้า ฉันจะสามารถดูแลด้านกลไกได้ถ้าคุณกรุณาออกแบบวงจรเพื่อควบคุมเซอร์โวมอเตอร์ในลักษณะที่สามารถหันไปทางใดก็ได้ตามการเปลี่ยนแปลงของรอบเครื่องยนต์ ขอบคุณมากในการคาดหวัง
แผนภูมิวงจรรวม

หมายเหตุ: มอเตอร์สามารถเปลี่ยนได้ด้วยโซลินอยด์ 12 V SPRING LOADED
การออกแบบ
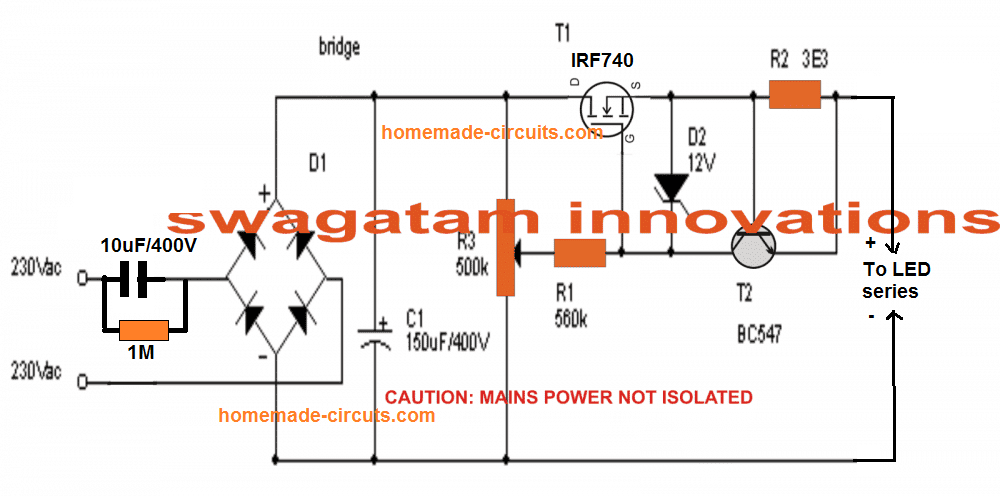
วงจรของตัวควบคุมความเร็วเครื่องยนต์ดีเซลหรือคอนโทรลเลอร์สามารถดูได้ในรูปด้านบนโดยใช้โปรเซสเซอร์ RPM ป้อนกลับหรือ วงจรเครื่องวัดวามเร็ว
ขั้นตอน IC1 555 ด้านซ้ายเป็นวงจรมาตรวัดความเร็วแบบง่ายซึ่งกำหนดค่าด้วย เซ็นเซอร์ Hall effect ติดกับล้อโหลดของเครื่องยนต์เพื่อตรวจจับอัตรา RPM
RPM จะถูกแปลงเป็นอัตราชีพจรหรือความถี่ที่แตกต่างกันตามสัดส่วนและถูกนำไปใช้ที่ฐานของ BJT สำหรับการสลับพิน # 2 ของ IC1
การทำงานของวงจร
โดยทั่วไปแล้ว IC1 นั้นจะอยู่ในโหมด monostable ซึ่งทำให้เอาต์พุตสร้างการปรับสวิตช์เปิด / ปิดตามสัดส่วนซึ่งกำหนดระยะเวลาโดยใช้หม้อ 1M ที่แสดง
เอาต์พุตจาก IC1 ซึ่งมีเนื้อหา RPM ในรูปแบบขยายเวลาพัลส์จะถูกทำให้เรียบอย่างเพียงพอโดยขั้นตอนการรวมซึ่งประกอบด้วยส่วนประกอบ RC สองสามตัวที่ใช้ตัวต้านทาน 1K, 10K และ 22uF 2.2uF ตัวเก็บประจุ
ขั้นตอนนี้จะแปลงข้อมูล RPM คร่าวๆของ monostable ให้เป็นแรงดันไฟฟ้าที่แปรผันอย่างราบรื่นหรือแตกต่างกันอย่างมีเหตุผล
สามารถมองเห็นแรงดันไฟฟ้าที่แปรผันแบบเอ็กซ์โปเนนเชียลนี้เชื่อมต่อกับพิน # 5 ของ IC2 555 สเตจถัดไปที่กำหนดค่าเป็นวงจร Astable
หน้าที่ของ astable นี้คือสร้างเอาต์พุต PWM ที่แคบหรือต่ำมากที่พิน # 3 ในสภาวะการทำงานปกติ
ในที่นี้สภาพการทำงานปกติหมายถึงสถานการณ์เมื่อ RPM ที่ตรวจจับอยู่ภายในขีด จำกัด ที่ระบุและขา # 5 ของ IC2 ไม่ได้รับแรงดันไฟฟ้าใด ๆ จากผู้ติดตามตัวปล่อย เอาต์พุต PWM ต่ำนี้สามารถใช้งานได้โดยการปรับตัวต้านทาน 100k สองตัวและตัวเก็บประจุ 1uF ที่เกี่ยวข้องกับ IC2 พิน # 6/2 และพิน # 7
PWM ที่ต่ำจากพิน # 3 ของ IC2 ไม่สามารถเปลี่ยน TIP122 ได้ยากพอสมควรดังนั้นชุดล้อมอเตอร์ที่ระบุจึงไม่สามารถรับโมเมนตัมที่ต้องการได้ดังนั้นจึงไม่สามารถปิดการทำงานได้
อย่างไรก็ตามเมื่อ RPM เริ่มสูงขึ้นเครื่องวัดวามเร็วจะเริ่มผลิตแรงดันไฟฟ้าที่สูงขึ้นแบบทวีคูณซึ่งจะทำให้แรงดันไฟฟ้าเพิ่มขึ้นตามสัดส่วนที่พิน # 5 ของ IC2
ในเวลาต่อมาทำให้ TIP122 ทำงานหนักขึ้นและมอเตอร์ที่เชื่อมต่อได้รับแรงบิดเพียงพอจึงเริ่มกดแป้นคันเร่งไปยังโหมดลดความเร็ว
ขั้นตอนนี้บังคับให้เครื่องยนต์ดีเซลต้องลดความเร็วลงซึ่งจะทำให้มาตรวัดความเร็วรอบและขั้นตอน PWM กลับคืนสู่สภาพเดิมและบังคับใช้ความเร็วควบคุมที่ต้องการสำหรับมอเตอร์ดีเซล
แทนที่จะเป็นการจัดเรียงมอเตอร์เร่งความเร็วที่แสดงไว้ตัวสะสมของ TIP122 สามารถต่อสายกับ หน่วย CDI ของเครื่องยนต์ดีเซลสำหรับการลดความเร็วที่เท่ากันเพื่ออำนวยความสะดวกในสถานะของแข็งและการใช้งานที่เชื่อถือได้มากขึ้นของการควบคุมความเร็วเครื่องยนต์อิเล็กทรอนิกส์หรือวงจรควบคุมความเร็วเครื่องยนต์อิเล็กทรอนิกส์
วิธีตั้งค่า
ในขั้นต้นให้ตัดการเชื่อมต่อขั้นตอน IC1, IC2 โดยการลบลิงก์ผู้ติดตามตัวปล่อยที่มีพิน # 5 ของ IC2
จากนั้นตรวจสอบให้แน่ใจว่าตัวต้านทาน 100k สองตัวได้รับการเปลี่ยนแปลงอย่างเหมาะสมและปรับให้เหมาะสมเพื่อให้พิน # 3 ของ IC2 สร้าง PWM ที่แคบที่สุดเท่าที่จะเป็นไปได้ (@ อัตราเวลา ON ประมาณ 5%)
หลังจากนี้ใช้ไฟล์ แหล่งจ่ายไฟที่ปรับได้ 0 ถึง 12V ใช้แรงดันไฟฟ้าที่แตกต่างกันที่พิน # 5 ของ IC2 และยืนยันว่า PWM ที่เพิ่มขึ้นตามสัดส่วนที่พิน # 3
เมื่อทดสอบส่วน astable แล้วจะต้องตรวจสอบเครื่องวัดวามเร็วโดยใช้พัลส์ RPM ที่ทราบซึ่งสอดคล้องกับ RPM เกินขีด จำกัด ที่ต้องการ ในระหว่างการปรับฐานของ BJT ที่ติดตามตัวปล่อยที่ตั้งไว้ล่วงหน้าเพื่อให้ตัวปล่อยของมันสามารถสร้างได้อย่างน้อย 10V หรือระดับที่เพียงพอที่จะทำให้ IC2 PWM สร้างแรงบิดที่ต้องการบนมอเตอร์ควบคุมแป้นเหยียบที่เชื่อมต่อ
หลังจากปรับแต่งและทดลองเพิ่มเติมแล้วคุณสามารถคาดหวังว่าจะได้รับการควบคุมความเร็วอัตโนมัติที่จำเป็นสำหรับเครื่องยนต์และโหลดที่เชื่อมต่อกับมัน
อัปเดต
หากมอเตอร์ถูกแทนที่ด้วยโซลินอยด์แบบสปริงการออกแบบข้างต้นอาจทำให้ง่ายขึ้นตามที่ระบุด้านล่าง:

เพลาโซลินอยด์สามารถใช้ร่วมกับแป้นคันเร่งเพื่อให้บรรลุการควบคุมความเร็วเครื่องยนต์อัตโนมัติ
สำหรับตัวเลือกเพิ่มเติมเกี่ยวกับตัวแปลงความถี่เป็นแรงดันไฟฟ้าคุณสามารถดูได้ที่ไฟล์ บทความนี้ .
คู่ของ: วงจรแอปพลิเคชั่นโรงยิมที่ควบคุมด้วยตัวจับเวลา ถัดไป: การชาร์จแบตเตอรี่ด้วย Piezo Mat Circuit