
ข้อดีบางประการเช่นต้นทุนต่ำการออกแบบที่ทนทานไม่ซับซ้อนน้อยกว่าและมอเตอร์ AC ที่บำรุงรักษาง่ายส่งผลให้การดำเนินงานทางอุตสาหกรรมหลายอย่างดำเนินการโดยใช้ ไดรฟ์ AC กว่าไดรฟ์ DC มอเตอร์เหนี่ยวนำกระแสสลับเป็นมอเตอร์ไฟฟ้าชนิดพิเศษที่มีลักษณะและประสิทธิภาพโดยทั่วไปในแง่ของการสตาร์ทการควบคุมความเร็วการป้องกันและอื่น ๆ

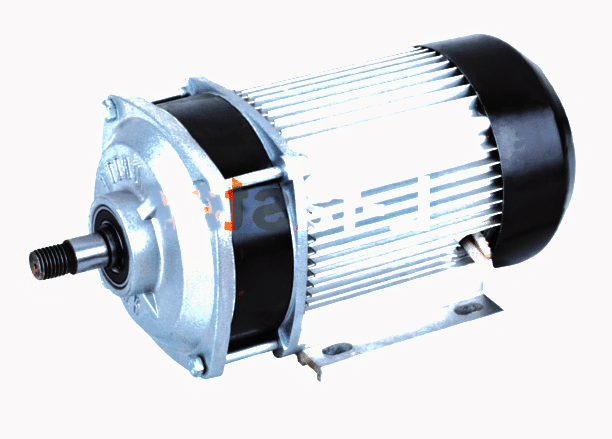
มอเตอร์เหนี่ยวนำกระแสสลับ
ประสิทธิภาพการทำงานที่หลากหลาย การใช้งานทำให้มอเตอร์เหนี่ยวนำสามเฟส คิดเป็นร้อยละ 85 ของกำลังการผลิตติดตั้งของระบบขับเคลื่อนอุตสาหกรรม ให้เราพูดคุยเกี่ยวกับข้อมูลพื้นฐานเกี่ยวกับมอเตอร์นี้และเทคนิคการควบคุมพิเศษของ SVPWM
มอเตอร์เหนี่ยวนำไฟฟ้ากระแสสลับสามเฟส
มอเตอร์เหนี่ยวนำกระแสสลับสามเฟสเป็นเครื่องจักรไฟฟ้าแบบหมุนที่ออกแบบมาเพื่อทำงานกับแหล่งจ่ายไฟสามเฟส มอเตอร์ 3 เฟสนี้เรียกอีกอย่างว่ามอเตอร์แบบอะซิงโครนัส มอเตอร์ AC เหล่านี้มีสองประเภท: มอเตอร์เหนี่ยวนำประเภทกระรอกและสลิปริง . หลักการทำงานของมอเตอร์นี้ขึ้นอยู่กับการผลิตสนามแม่เหล็กหมุน
การก่อสร้างมอเตอร์เหนี่ยวนำ 3 เฟส
มอเตอร์สามเฟสเหล่านี้ประกอบด้วยสเตเตอร์และโรเตอร์และระหว่างที่ไม่มีการเชื่อมต่อทางไฟฟ้า สเตเตอร์และโรเตอร์เหล่านี้สร้างขึ้นโดยใช้วัสดุแกนแม่เหล็กสูงเพื่อลดการสูญเสียฮิสเทอรีซิสและกระแสไหลวน

การก่อสร้างมอเตอร์เหนี่ยวนำ 3 เฟส
โครงสเตเตอร์สามารถสร้างได้โดยใช้เหล็กหล่ออลูมิเนียมหรือเหล็กรีด โครงสเตเตอร์ให้การป้องกันเชิงกลที่จำเป็นและรองรับแกนเคลือบสเตเตอร์ขดลวดและการจัดเตรียมอื่น ๆ สำหรับการระบายอากาศ สเตเตอร์ได้รับบาดเจ็บด้วยขดลวดสามเฟสซึ่งซ้อนทับกันที่การกะระยะ 120 องศาซึ่งติดตั้งเข้ากับการเคลือบแบบ slotted ปลายทั้งหกของขดลวดทั้งสามจะถูกดึงออกมาและเชื่อมต่อกับกล่องเทอร์มินัลเพื่อให้ขดลวดเหล่านี้ตื่นเต้นกับแหล่งจ่ายไฟหลักสามเฟส
ขดลวดเหล่านี้เป็นลวดทองแดงที่หุ้มด้วยสารเคลือบเงาที่ติดตั้งในแผ่นเคลือบฉนวน ที่อุณหภูมิการทำงานทั้งหมดสารเคลือบเงาที่ชุบนี้จะยังคงแข็ง ขดลวดเหล่านี้มีความต้านทานฉนวนสูงและมีความต้านทานสูงต่อบรรยากาศน้ำเกลือความชื้นควันอัลคาไลน์น้ำมันและจาระบี ฯลฯ แล้วแต่ว่าระดับใดจะเหมาะสมกับระดับแรงดันไฟฟ้าขดลวดเหล่านี้จะเชื่อมต่อกัน การเชื่อมต่อแบบดาวหรือเดลต้า .

มอเตอร์เหนี่ยวนำกรงกระรอก
โรเตอร์ของมอเตอร์เหนี่ยวนำกระแสสลับสามเฟสแตกต่างกันสำหรับมอเตอร์เหนี่ยวนำสลิปริงและกรงกระรอก โรเตอร์ในประเภทสลิปริงประกอบด้วยแท่งอลูมิเนียมหนักหรือทองแดงที่ลัดวงจรที่ปลายทั้งสองข้างของโรเตอร์ทรงกระบอก เพลาของมอเตอร์เหนี่ยวนำได้รับการสนับสนุนบนแบริ่งสองตัวที่ปลายแต่ละด้านเพื่อให้แน่ใจว่าหมุนได้อย่างอิสระภายในสเตเตอร์และเพื่อลดแรงเสียดทาน ประกอบด้วยสแต็คของแผ่นเคลือบเหล็กที่เว้นระยะห่างเท่า ๆ กันซึ่งเจาะรอบ ๆ เส้นรอบวงซึ่งวางอลูมิเนียมหนักหรือแท่งทองแดงที่ไม่หุ้มฉนวน
โรเตอร์แบบสลิปริงประกอบด้วยขดลวดสามเฟสที่ติดดาวไว้ภายในที่ปลายด้านหนึ่งและปลายอีกด้านหนึ่งจะถูกนำออกมาด้านนอกและเชื่อมต่อกับวงแหวนสลิปที่ติดตั้งบนเพลาโรเตอร์ และสำหรับการพัฒนาแรงบิดเริ่มต้นสูงขดลวดเหล่านี้เชื่อมต่อกับรีโอสแตทโดยใช้แปรงถ่าน ตัวต้านทานภายนอกหรือรีโอสแตทนี้ใช้ในช่วงเริ่มต้นเท่านั้น เมื่อมอเตอร์บรรลุความเร็วปกติแปรงจะลัดวงจรและโรเตอร์บาดแผลจะทำงานเป็นโรเตอร์กรงกระรอก
หลักการทำงานของมอเตอร์เหนี่ยวนำ 3 เฟส

หลักการทำงานของมอเตอร์เหนี่ยวนำ 3 เฟส
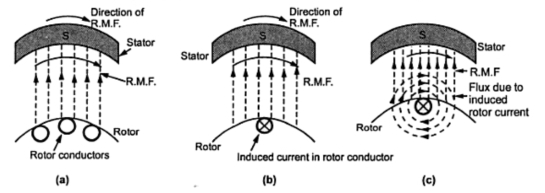
- เมื่อมอเตอร์ตื่นเต้นกับการจ่ายไฟสามเฟสขดลวดสเตเตอร์สามเฟสจะสร้างสนามแม่เหล็กหมุนโดยมีการกระจัด 120 ครั้งที่ขนาดคงที่ซึ่งหมุนด้วยความเร็วซิงโครนัส สนามแม่เหล็กที่เปลี่ยนแปลงนี้จะตัดตัวนำของโรเตอร์และเหนี่ยวนำให้เกิดกระแสตามหลักการของกฎการเหนี่ยวนำแม่เหล็กไฟฟ้าของฟาราเดย์ เนื่องจากตัวนำของโรเตอร์เหล่านี้สั้นลงกระแสจึงเริ่มไหลผ่านตัวนำเหล่านี้
- ต่อหน้าสนามแม่เหล็กของสเตเตอร์จะมีการวางตัวนำโรเตอร์ดังนั้นตามหลักการของแรงลอเรนซ์แรงเชิงกลจะกระทำต่อตัวนำของโรเตอร์ ดังนั้นตัวนำของโรเตอร์ทั้งหมดจึงบังคับเช่นผลรวมของแรงเชิงกลทำให้เกิดแรงบิดในโรเตอร์ซึ่งมีแนวโน้มที่จะเคลื่อนที่ไปในทิศทางเดียวกันของสนามแม่เหล็กหมุน
- การหมุนของตัวนำโรเตอร์นี้สามารถอธิบายได้ด้วยกฎของ Lenz ซึ่งบอกว่ากระแสที่เหนี่ยวนำในโรเตอร์ต่อต้านสาเหตุของการผลิตที่นี่การต่อต้านนี้คือการหมุนสนามแม่เหล็ก ส่งผลให้โรเตอร์เริ่มหมุนไปในทิศทางเดียวกันของสเตเตอร์ที่หมุนสนามแม่เหล็ก หากความเร็วของโรเตอร์มากกว่าความเร็วของสเตเตอร์จะไม่มีกระแสไฟฟ้าเกิดขึ้นในโรเตอร์เนื่องจากสาเหตุของการหมุนของโรเตอร์คือความเร็วสัมพัทธ์ของสนามแม่เหล็กของโรเตอร์และสเตเตอร์ ความแตกต่างของสนามสเตเตอร์และโรเตอร์นี้เรียกว่าสลิป วิธีนี้เรียกมอเตอร์ 3 เฟสว่าเครื่องอะซิงโครนัสเนื่องจากความแตกต่างของความเร็วสัมพัทธ์ระหว่างสเตเตอร์และโรเตอร์
- ดังที่เราได้กล่าวไว้ข้างต้นความเร็วสัมพัทธ์ระหว่างสนามสเตเตอร์และตัวนำของโรเตอร์ทำให้โรเตอร์หมุนไปในทิศทางใดทิศทางหนึ่ง ดังนั้นในการสร้างการหมุนความเร็วของโรเตอร์ Nr จะต้องน้อยกว่าความเร็วสนามสเตเตอร์ Ns เสมอและความแตกต่างระหว่างพารามิเตอร์ทั้งสองนี้ขึ้นอยู่กับโหลดของมอเตอร์
ความแตกต่างของความเร็วหรือการลื่นของมอเตอร์เหนี่ยวนำ AC แสดงเป็น

- เมื่อสเตเตอร์นิ่ง Nr = 0 สลิปจึงกลายเป็น 1 หรือ 100%
- เมื่อ Nr อยู่ที่ความเร็วซิงโครนัสสลิปจะกลายเป็นศูนย์ดังนั้นมอเตอร์จึงไม่ทำงานด้วยความเร็วซิงโครนัส
- การลื่นไถลในมอเตอร์เหนี่ยวนำ 3 เฟสตั้งแต่ไม่มีโหลดไปจนถึงโหลดเต็มจะอยู่ที่ประมาณ 0.1% ถึง 3% นั่นคือสาเหตุที่เรียกว่ามอเตอร์เหนี่ยวนำเป็นมอเตอร์ความเร็วคงที่
SVPWM ควบคุมมอเตอร์เหนี่ยวนำ 3 เฟส
โดยทั่วไปสำหรับการควบคุมมอเตอร์เหนี่ยวนำจะใช้ไดรฟ์ที่ใช้อินเวอร์เตอร์ PWM เมื่อเทียบกับไดรฟ์ความถี่คงที่เหล่านี้ PWM ดำน้ำควบคุม ทั้งขนาดของแรงดันไฟฟ้าและความถี่ของกระแสไฟฟ้าตลอดจนแรงดันไฟฟ้าที่ใช้กับมอเตอร์เหนี่ยวนำ ด้วยการเปลี่ยนสัญญาณ PWM ที่ใช้กับประตูสวิตช์ไฟปริมาณพลังงานที่ส่งโดยไดรฟ์เหล่านี้จะแตกต่างกันไปด้วยเพื่อให้สามารถควบคุมความเร็วมอเตอร์เหนี่ยวนำสามเฟสได้

SVPWM การควบคุมมอเตอร์เหนี่ยวนำ 3 เฟสโดย Edgefxkits.com
โครงร่างการมอดูเลตความกว้างพัลส์ (PWM) จำนวนหนึ่งใช้สำหรับควบคุมมอเตอร์ไดรฟ์สามเฟส แต่ส่วนใหญ่จะใช้ Sine PWM (SPWM) และ Space vector PWM (SVPWM) เมื่อเปรียบเทียบกับ SPWM การควบคุม SVPWM จะให้แรงดันไฟฟ้าพื้นฐานในระดับที่สูงขึ้นและปริมาณฮาร์มอนิกที่ลดลง ที่นี่เราได้ให้การควบคุม SVPWM นี้ในทางปฏิบัติโดยใช้ ไมโครคอนโทรลเลอร์ 8051 .
ในวงจรด้านล่างจะใช้อินเวอร์เตอร์แรงดันไฟฟ้าสามระดับสำหรับการรับแรงดันเอาต์พุตสามตัวขึ้นอยู่กับแรงดันไฟฟ้าบัส DC แหล่งจ่ายเฟสเดียวได้รับการแก้ไขเพื่อจ่ายไฟ DC ให้กับวงจรไมโครคอนโทรลเลอร์และวงจรอินเวอร์เตอร์ 8051 ไมโครคอนโทรลเลอร์ถูกตั้งโปรแกรมให้ผลิตสัญญาณ SVPWM ซึ่งมอบให้กับ IC ไดรเวอร์เกต

แผนภาพบล็อกของ SVPWM การควบคุมมอเตอร์เหนี่ยวนำ 3 เฟสโดย Edgefxkits.com
วงจรอินเวอร์เตอร์ประกอบด้วย MOSFET หกตัวเพื่อผลิตแหล่งจ่ายสามเฟสแบบแปรผันสำหรับแต่ละเฟสสอง MOSFET จะถูกปรับใช้ ประตู MOSFET เหล่านี้เชื่อมต่อกับ IC ไดรเวอร์เกต เมื่อได้รับสัญญาณ PWM จากสวิตช์ไดรเวอร์เกตไมโครคอนโทรลเลอร์ MOSFETs เพื่อให้เกิดแรงดันเอาต์พุต AC แบบแปรผัน ดังนั้นตัวแปร AC ที่มีการเปลี่ยนแปลงของแรงดันไฟฟ้าและความถี่จึงแตกต่างกันไป ความเร็วของมอเตอร์ .
นี่คือข้อมูลพื้นฐานเกี่ยวกับมอเตอร์เหนี่ยวนำกระแสสลับที่มีโครงสร้างและหลักการทำงาน นอกจากนี้เทคนิค SVPWM ในการควบคุมความเร็วของมอเตอร์ยังมีข้อดีกว่าเทคนิค PWM อื่น ๆ ดังที่เราเห็นข้างต้น หากคุณมีข้อสงสัยเกี่ยวกับ ไมโครคอนโทรลเลอร์การเขียนโปรแกรม สำหรับการนำเทคนิค SVPWM ไปใช้คุณสามารถติดต่อเราได้โดยการแสดงความคิดเห็นด้านล่าง
เครดิตภาพ:
- มอเตอร์เหนี่ยวนำกระแสสลับโดย วิกิมีเดีย
- มอเตอร์เหนี่ยวนำ 3 เฟสก่อสร้างโดย การออกแบบอิเล็กทรอนิกส์
- สลิปริงและมอเตอร์เหนี่ยวนำกรงกระรอกโดย tpub
- หลักการทำงานของมอเตอร์เหนี่ยวนำ 3 เฟสโดย blogspot









{kind=link}
{kind=link}
{kind=link}