เครื่องไฟฟ้านั่นเอง แปลงพลังงานไฟฟ้า เป็นพลังงานกลเรียกว่ามอเตอร์ไฟฟ้า มอเตอร์ไฟฟ้าตัวแรกและสำคัญที่สุดคืออุปกรณ์ไฟฟ้าสถิตแบบง่ายๆที่สร้างโดยพระภิกษุแอนดรูว์กอร์ดอนชาวสก็อตในปี 1740 แต่ในปีพ. ศ. 2364 Michael Faraday ได้แสดงให้เห็นถึงการเปลี่ยนพลังงานไฟฟ้าเป็นพลังงานกล
มอเตอร์ไฟฟ้าแบ่งออกเป็นสองประเภทหลัก ๆ คือมอเตอร์ AC และ มอเตอร์กระแสตรง . อีกครั้งแต่ละประเภทแบ่งออกเป็นหลายประเภท โหลดจำนวนมากเช่นมิกเซอร์เครื่องบดพัดลม ฯลฯ เครื่องใช้ในบ้านที่ใช้บ่อยที่สุดซึ่งเราสามารถพบมอเตอร์ประเภทต่างๆและสามารถทำงานด้วยความเร็วที่แตกต่างกันโดยมีการควบคุมความเร็วของมอเตอร์ ในบทความนี้เราจะพูดถึงมอเตอร์กระแสตรงประเภทหนึ่งที่สำคัญ ได้แก่ สเต็ปเปอร์มอเตอร์และการควบคุม โดยใช้ไมโครคอนโทรลเลอร์
สเต็ปเปอร์มอเตอร์
ซิงโครนัสและ มอเตอร์กระแสตรงไร้แปรงถ่าน ที่แปลงพัลส์ไฟฟ้าเป็นการเคลื่อนไหวเชิงกลดังนั้นการหมุนตามขั้นตอนโดยมีมุมที่แน่นอนระหว่างแต่ละขั้นตอนเพื่อให้การหมุนเต็มรูปแบบเรียกว่า Stepper Motor มุมระหว่างขั้นตอนการหมุนของสเต็ปเปอร์มอเตอร์เรียกว่ามุมสเต็ปเปอร์ของมอเตอร์

สเต็ปเปอร์มอเตอร์
มอเตอร์สเต็ปเปอร์แบ่งออกเป็นสองประเภทตามการคดเคี้ยว: Unipolar Stepper Motors และ Bipolar Stepper Motors มอเตอร์สเต็ปเปอร์ยูนิโพลาร์มักถูกใช้ในหลาย ๆ แอพพลิเคชั่นเนื่องจากใช้งานง่ายเมื่อเทียบกับมอเตอร์สเต็ปสองขั้ว แต่มีสเต็ปเปอร์มอเตอร์ประเภทต่างๆเช่นมอเตอร์แม่เหล็กถาวร, สเต็ปเปอร์มอเตอร์แบบแปรผันและไฮบริดสเต็ปเปอร์มอเตอร์
Stepper Motor Control
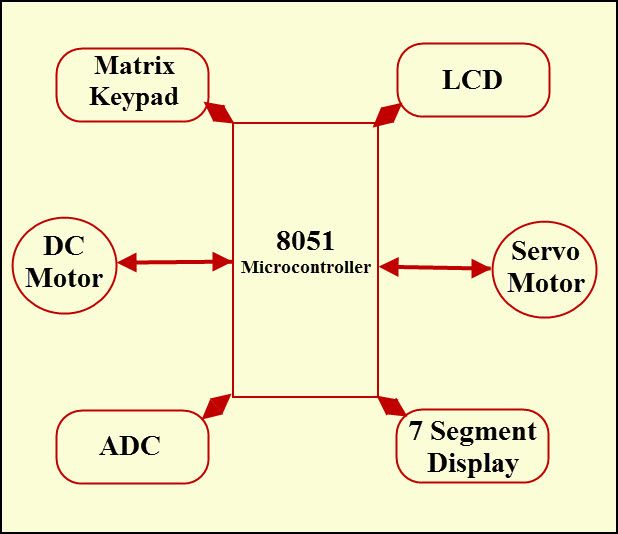
สเต็ปเปอร์มอเตอร์สามารถควบคุมได้ด้วยเทคนิคต่างๆ แต่ที่นี่เรากำลังพูดถึงการควบคุมมอเตอร์สเต็ปโดยใช้ ไมโครคอนโทรลเลอร์ Atmega . 89C51 เป็นไมโครคอนโทรลเลอร์ของ ไมโครคอนโทรลเลอร์ตระกูล 8051 .

แผนภาพบล็อกของ Stepper Motor Control
แผนภาพบล็อกของการควบคุมมอเตอร์แบบสเต็ปเปอร์โดยใช้ไมโครคอนโทรลเลอร์ 8051 แสดงในรูปที่มี แหล่งจ่ายไฟ , ไมโครคอนโทรลเลอร์, สเต็ปเปอร์มอเตอร์และบล็อกสวิตช์ควบคุม
2 วิธีในการออกแบบวงจรควบคุม Stepper Motor
ตัวควบคุมมอเตอร์สเต็ปได้รับการออกแบบ ใช้ไมโครคอนโทรลเลอร์ 8051 และวงจรสวิตชิ่งสำหรับควบคุมความเร็วของสเต็ปเปอร์มอเตอร์ วงจรสวิตช์ควบคุมสามารถออกแบบได้โดยใช้ สวิตช์ทรานซิสเตอร์ หรือโดยใช้ไอซีควบคุมสเต็ปเปอร์มอเตอร์เช่น ULN2003 แทนทรานซิสเตอร์
1. วงจรควบคุมโดยใช้ไอซี Stepper Motor Controller
มอเตอร์สเตเตอร์แบบ unipolar สามารถหมุนได้โดยการจ่ายพลังงานให้กับขดลวดสเตเตอร์ตามลำดับ ลำดับของสัญญาณแรงดันไฟฟ้าเหล่านี้ที่ใช้กับขดลวดของมอเตอร์หรือสายนำเพียงพอที่จะขับเคลื่อนมอเตอร์และด้วยเหตุนี้จึงไม่จำเป็นต้องใช้วงจรขับเพื่อควบคุมทิศทางของกระแสในขดลวดสเตเตอร์

Stepper Motor Control โดยใช้ IC
มอเตอร์แบบสองเฟสประกอบด้วยสายไฟสี่เส้นที่เชื่อมต่อกับขดลวดและสายไฟทั่วไปสองเส้นที่เชื่อมต่อกับปลายทั้งสองจะทำให้เกิดสองเฟส จุดร่วมและจุดสิ้นสุดของสองเฟสเชื่อมต่อกับกราวด์หรือ Vcc และหมุดไมโครคอนโทรลเลอร์ตามลำดับ สำหรับการหมุนมอเตอร์จุดสิ้นสุดของสองเฟสจะได้รับพลังงาน โดยทั่วไปแรงดันไฟฟ้าจะถูกนำไปใช้กับจุดสิ้นสุดแรกของเฟส 1 และแรงดันไฟฟ้าต่อไปจะถูกนำไปใช้กับจุดสิ้นสุดแรกของเฟส 2 และอื่น ๆ
มอเตอร์สเต็ปเปอร์สามารถใช้งานได้ในโหมดต่างๆเช่น Wave Drive Stepping Mode, Full Drive Stepping Mode และ Half Drive Stepping Mode
โหมด Wave Drive Stepping
โดยการทำซ้ำตามลำดับข้างต้นทำให้สามารถหมุนมอเตอร์ในโหมด wave-drive-step ได้ทั้งในทิศทางตามเข็มนาฬิกาหรือทวนเข็มนาฬิกาตามการเลือกจุดสิ้นสุด ตารางด้านล่างแสดงลำดับเฟสของสัญญาณสำหรับโหมด wave-drive-step


โหมด Wave Drive Stepping
โหมดก้าวเต็มของไดรฟ์
การเพิ่มพลังให้กับจุดสิ้นสุดทั้งสองของเฟสที่แตกต่างกันไปพร้อม ๆ กันทำให้ได้โหมดสเต็ปปิ้งเต็มไดรฟ์ ตารางแสดงลำดับเฟสสัญญาณสำหรับโหมดสเต็ปปิ้งไดรฟ์เต็มรูปแบบ


โหมดก้าวเต็มของไดรฟ์
โหมด Half Drive Stepping
การรวมกันของขั้นตอนของคลื่นและโหมด Full-drive-step ทำให้ได้โหมด half-drive-step ดังนั้นในโหมดนี้มุมก้าวจะถูกแบ่งออกเป็นครึ่งหนึ่ง ตารางแสดงลำดับเฟสสัญญาณของโหมด half-drive-step


โหมด Half Drive Stepping
โดยทั่วไปมุมก้าวขึ้นอยู่กับความละเอียดของมอเตอร์สเต็ปเปอร์ ขนาดของขั้นตอนและทิศทางของการหมุนเป็นสัดส่วนโดยตรงกับจำนวนและลำดับของลำดับอินพุต ความเร็วในการหมุนของเพลาขึ้นอยู่กับความถี่ของลำดับอินพุต แรงบิดและจำนวนแม่เหล็กที่ทำให้แม่เหล็กในแต่ละครั้งเป็นสัดส่วน
มอเตอร์สเต็ปเปอร์ต้องการกระแส 60mA แต่พิกัดกระแสสูงสุดของไมโครคอนโทรลเลอร์ Atmega AT89C51 คือ 50mA ดังนั้นไอซีสเต็ปเปอร์มอเตอร์ - คอนโทรลเลอร์จึงใช้เพื่อเชื่อมต่อสเต็ปเปอร์มอเตอร์กับไมโครคอนโทรลเลอร์เพื่อถ่ายโอนสัญญาณ
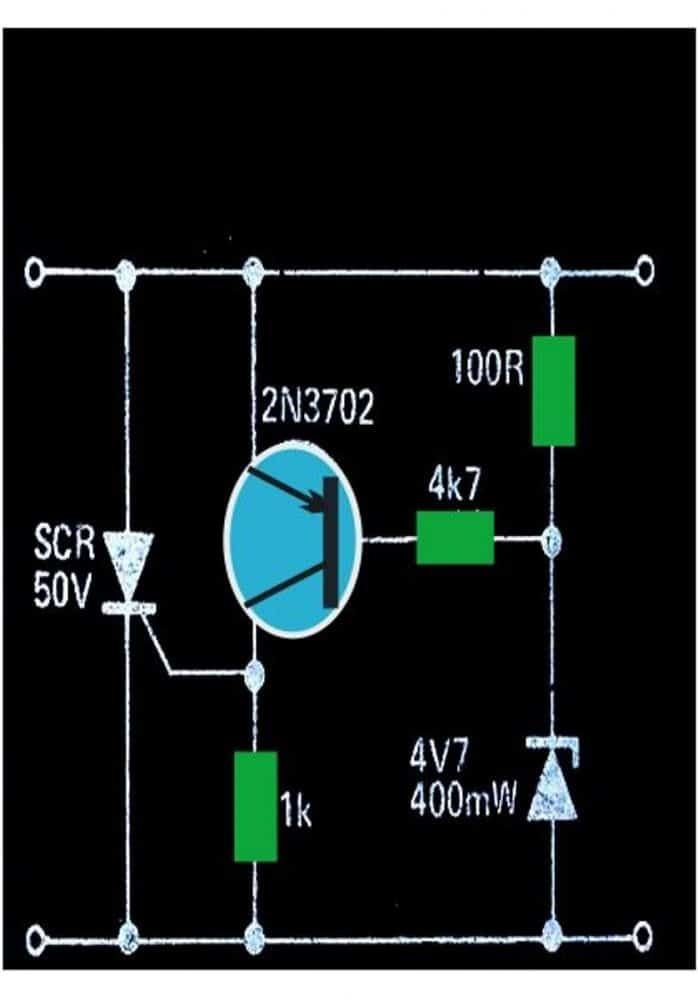
2. วงจรสวิตช์ควบคุมโดยใช้ทรานซิสเตอร์
สามารถจ่ายไฟให้กับวงจรได้โดยการลดแรงดันไฟฟ้าจาก 230V เป็น 7.5V โดยใช้หม้อแปลงแบบ step-down จากนั้น แก้ไขโดยบริดจ์เร็กติไฟเออร์พร้อมไดโอด . เอาต์พุตที่แก้ไขแล้วนี้จะถูกป้อนเข้ากับตัวเก็บประจุตัวกรองจากนั้นส่งผ่านตัวควบคุมแรงดันไฟฟ้า เอาต์พุตที่มีการควบคุม 5V ได้มาจากตัวควบคุมแรงดันไฟฟ้า รีเซ็ตพิน 9 เชื่อมต่อระหว่างตัวเก็บประจุและตัวต้านทาน

Stepper Motor Control Circuit โดยใช้ทรานซิสเตอร์
โดยทั่วไปสเต็ปเปอร์มอเตอร์ประกอบด้วยขดลวดสี่ขดดังแสดงในรูป ดังนั้นในการขับเคลื่อนมอเตอร์จำเป็นต้องมีวงจรขับมอเตอร์สี่ตัว แทนที่จะใช้ไอซีควบคุมมอเตอร์สเต็ปเปอร์ในการขับเคลื่อนมอเตอร์ทรานซิสเตอร์สี่ตัวจะเชื่อมต่อเป็นวงจรขับที่ 21, 22, 23 และ 24 พินของไมโครคอนโทรลเลอร์ตามลำดับ
หากทรานซิสเตอร์เริ่มต้นการนำไฟฟ้าสนามแม่เหล็กจะถูกสร้างขึ้นรอบ ๆ ขดลวดทำให้เกิดการหมุนของมอเตอร์ ความเร็วของมอเตอร์สเต็ปเปอร์เป็นสัดส่วนโดยตรงกับความถี่พัลส์อินพุต คริสตัลออสซิลเลเตอร์เชื่อมต่อกับพิน 18 และ 19 เพื่อให้ความถี่สัญญาณนาฬิกาไมโครคอนโทรลเลอร์ประมาณ 11.019MHz
เวลาดำเนินการของคำสั่งใด ๆ สามารถคำนวณได้โดยใช้สูตรด้านล่าง
เวลา = ((C * 12)) / ฉ
โดยที่ C = จำนวนรอบ
และ F = ความถี่คริสตัล
หนึ่งในวงจรตามแอพพลิเคชั่นที่ใช้มอเตอร์สเต็ปเปอร์สำหรับแผงโซลาร์เซลล์แบบหมุนได้อธิบายไว้ด้านล่าง
Stepper Motor Control โดยใช้ไมโครคอนโทรลเลอร์ 8051 ที่ตั้งโปรแกรมไว้
โครงการ Sun Tracking Solar Panel มีจุดมุ่งหมายเพื่อสร้างปริมาณพลังงานสูงสุดโดยการปรับแผงโซลาร์เซลล์โดยอัตโนมัติ ในโครงการนี้มอเตอร์สเต็ปเปอร์ที่ควบคุมโดยไมโครคอนโทรลเลอร์ที่ตั้งโปรแกรมไว้ของตระกูล 8051 จะเชื่อมต่อกับแผงโซลาร์เซลล์เพื่อรักษาหน้าของแผงโซลาร์เซลล์ให้ตั้งฉากกับดวงอาทิตย์เสมอ

Stepper Motor Control โดยใช้ไมโครคอนโทรลเลอร์โดย Edgefxkits.com
ไมโครคอนโทรลเลอร์ที่ตั้งโปรแกรมไว้ สร้างพัลส์ไฟฟ้าแบบขั้นบันไดเป็นระยะ ๆ ไปยังสเต็ปเปอร์มอเตอร์เพื่อหมุนแผงโซลาร์เซลล์ IC ไดรเวอร์ใช้ในการขับเคลื่อนสเต็ปเปอร์มอเตอร์เนื่องจากคอนโทรลเลอร์ไม่สามารถระบุข้อกำหนดด้านพลังงานของมอเตอร์ได้
โปรดแสดงข้อเสนอแนะข้อเสนอแนะและข้อสงสัยของคุณโดยโพสต์ความคิดเห็นในส่วนความคิดเห็นด้านล่าง เราจะพยายามอย่างเต็มที่เพื่อช่วยเหลือคุณในทางเทคนิคเกี่ยวกับบทความนี้และ การพัฒนาโครงการไฟฟ้าและอิเล็กทรอนิกส์ โดยใช้สเต็ปเปอร์มอเตอร์