
สเต็ปเปอร์มอเตอร์เป็นอุปกรณ์ไฟฟ้าที่แปลงพลังงานไฟฟ้าเป็นพลังงานกล นอกจากนี้ยังเป็นมอเตอร์ไฟฟ้าแบบซิงโครนัสแบบไม่ใช้แปรงถ่านที่สามารถแบ่งการหมุนเต็มออกเป็นจำนวนก้าวที่กว้างขวาง สามารถควบคุมตำแหน่งของมอเตอร์ได้อย่างแม่นยำโดยไม่ต้องใช้กลไกตอบสนองใด ๆ ตราบใดที่มอเตอร์มีขนาดพอดีกับการใช้งาน สเต็ปเปอร์มอเตอร์คล้ายกับสวิตช์ มอเตอร์ไม่เต็มใจ สเต็ปเปอร์มอเตอร์ใช้ทฤษฎีการทำงานของแม่เหล็กเพื่อทำให้เพลามอเตอร์หมุนได้ระยะทางที่แม่นยำเมื่อมีการจ่ายกระแสไฟฟ้า สเตเตอร์มีแปดขั้วและโรเตอร์มีหกขั้ว โรเตอร์จะต้องใช้กระแสไฟฟ้า 24 พัลส์ในการเคลื่อนที่ 24 ขั้นตอนเพื่อให้เกิดการปฏิวัติที่สมบูรณ์ อีกวิธีหนึ่งในการกล่าวคือโรเตอร์จะเคลื่อนที่อย่างแม่นยำ 15 °สำหรับแต่ละพัลส์ไฟฟ้าที่มอเตอร์ได้รับ
หลักการก่อสร้างและการทำงาน
การสร้างมอเตอร์สเต็ปเปอร์ ค่อนข้างเกี่ยวข้องกับไฟล์ มอเตอร์กระแสตรง . ประกอบด้วยแม่เหล็กถาวรเช่นโรเตอร์ซึ่งอยู่ตรงกลางและจะหมุนเมื่อมีแรงกระทำกับมัน โรเตอร์นี้ล้อมรอบด้วยหมายเลข ของสเตเตอร์ที่พันผ่านขดลวดแม่เหล็กให้ทั่ว สเตเตอร์จัดอยู่ใกล้กับโรเตอร์เพื่อให้สนามแม่เหล็กภายในสเตเตอร์สามารถควบคุมการเคลื่อนที่ของโรเตอร์ได้

สเต็ปเปอร์มอเตอร์
มอเตอร์สเต็ปสามารถควบคุมได้โดยการจ่ายพลังงานให้กับสเตเตอร์ทุกตัว ดังนั้นสเตเตอร์จะดึงดูดและทำงานเหมือนขั้วแม่เหล็กไฟฟ้าซึ่งใช้พลังงานที่น่ารังเกียจบนโรเตอร์เพื่อเคลื่อนที่ไปข้างหน้า ทางเลือกอื่นของการทำให้เป็นแม่เหล็กและการลดอำนาจแม่เหล็กของสเตเตอร์จะทำให้โรเตอร์ค่อยๆเลื่อนและช่วยให้หมุนผ่านการควบคุมที่ดี
หลักการทำงานของมอเตอร์สเต็ปเปอร์ คือ Electro-Magnetism ประกอบด้วยโรเตอร์ซึ่งทำด้วยแม่เหล็กถาวรในขณะที่สเตเตอร์มีแม่เหล็กไฟฟ้า เมื่อจ่ายไฟให้กับขดลวดของสเตเตอร์แล้วสนามแม่เหล็กจะถูกพัฒนาขึ้นภายในสเตเตอร์ ตอนนี้โรเตอร์ในมอเตอร์จะเริ่มเคลื่อนที่ด้วยสนามแม่เหล็กหมุนของสเตเตอร์ นี่คือหลักการทำงานพื้นฐานของมอเตอร์นี้

การก่อสร้าง Stepper Motor
ในมอเตอร์นี้มีเหล็กอ่อนที่ล้อมรอบผ่านสเตเตอร์แม่เหล็กไฟฟ้า เสาของสเตเตอร์และโรเตอร์ไม่ได้ขึ้นอยู่กับชนิดของสเต็ปเปอร์ เมื่อสเตเตอร์ของมอเตอร์นี้ได้รับการกระตุ้นแล้วโรเตอร์จะหมุนเพื่อให้เข้ากับสเตเตอร์มิฉะนั้นจะเปลี่ยนให้มีช่องว่างน้อยที่สุดผ่านสเตเตอร์ ด้วยวิธีนี้สเตเตอร์จะทำงานเป็นชุดเพื่อหมุนมอเตอร์สเต็ปเปอร์
เทคนิคการขับรถ
เทคนิคการขับสเต็ปเปอร์มอเตอร์ s สามารถเป็นไปได้ด้วยวงจรพิเศษเนื่องจากการออกแบบที่ซับซ้อน มีหลายวิธีในการขับเคลื่อนมอเตอร์นี้บางวิธีมีการกล่าวถึงด้านล่างโดยการยกตัวอย่างสเต็ปเปอร์มอเตอร์สี่เฟส
โหมดกระตุ้นเดี่ยว
วิธีการพื้นฐานในการขับสเต็ปเปอร์มอเตอร์คือโหมดกระตุ้นเดี่ยว เป็นวิธีการที่เก่าแก่และไม่ได้ใช้กันมากในปัจจุบัน แต่มีข้อควรรู้เกี่ยวกับเทคนิคนี้ ในเทคนิคนี้ทุกๆเฟสมิฉะนั้นสเตเตอร์ที่อยู่ติดกันจะถูกกระตุ้นทีละตัวหรือด้วยวงจรพิเศษ สิ่งนี้จะทำให้แม่เหล็กเป็นแม่เหล็กและทำให้สเตเตอร์หลุดออกเพื่อเคลื่อนโรเตอร์ไปข้างหน้า
ไดรฟ์แบบเต็มขั้นตอน
ในเทคนิคนี้สเตเตอร์สองตัวจะถูกเปิดใช้งานพร้อมกันแทนที่จะเป็นหนึ่งตัวในช่วงเวลาที่น้อยกว่ามาก เทคนิคนี้ส่งผลให้เกิดแรงบิดสูงและช่วยให้มอเตอร์ขับเคลื่อนภาระสูง
Half Step Drive
เทคนิคนี้ค่อนข้างเกี่ยวข้องกับไดรฟ์แบบเต็มขั้นตอนเนื่องจากสเตเตอร์ทั้งสองจะถูกจัดเรียงติดกันเพื่อให้เปิดใช้งานก่อนในขณะที่ตัวที่สามจะเปิดใช้งานหลังจากนั้น วงจรประเภทนี้สำหรับการเปลี่ยนสเตเตอร์สองตัวก่อนและหลังจากนั้นสเตเตอร์ที่สามจะขับเคลื่อนมอเตอร์ เทคนิคนี้จะส่งผลให้ความละเอียดของสเต็ปเปอร์มอเตอร์ดีขึ้นในขณะที่แรงบิดลดลง
ไมโครสเต็ปปิ้ง
เทคนิคนี้ใช้บ่อยที่สุดเนื่องจากความแม่นยำ กระแสขั้นตอนตัวแปรจะจ่ายโดย วงจรขับสเต็ปมอเตอร์ ไปยังขดลวดสเตเตอร์ภายในรูปแบบของรูปคลื่นไซน์ ความแม่นยำของทุกขั้นตอนสามารถเพิ่มขึ้นได้ด้วยกระแสไฟฟ้าขั้นตอนเล็ก ๆ นี้ เทคนิคนี้ใช้กันอย่างแพร่หลายเนื่องจากให้ความแม่นยำสูงและลดเสียงรบกวนจากการทำงานได้มาก
Stepper Motor Circuit และการทำงาน
สเต็ปเปอร์มอเตอร์ทำงานแตกต่างจาก มอเตอร์แปรง DC ซึ่งจะหมุนเมื่อแรงดันไฟฟ้าถูกนำไปใช้กับขั้วของพวกเขา ในทางกลับกันมอเตอร์สเต็ปเปอร์มีแม่เหล็กไฟฟ้าหลายซี่ที่เรียงกันอย่างมีประสิทธิภาพรอบชิ้นส่วนเหล็กรูปเฟืองกลาง แม่เหล็กไฟฟ้าได้รับพลังงานจากวงจรควบคุมภายนอกตัวอย่างเช่นไมโครคอนโทรลเลอร์

วงจร Stepper Motor
ในการทำให้เพลามอเตอร์หมุนแม่เหล็กไฟฟ้าตัวแรกจะได้รับกำลังซึ่งทำให้ฟันของเฟืองดึงดูดแม่เหล็กไฟฟ้าเข้ากับฟันของแม่เหล็กไฟฟ้า เมื่อถึงจุดที่ฟันของเฟืองอยู่ในแนวเดียวกันกับแม่เหล็กไฟฟ้าตัวแรกพวกมันจะหักล้างกับแม่เหล็กไฟฟ้าตัวถัดไปเล็กน้อย ดังนั้นเมื่อแม่เหล็กไฟฟ้าตัวถัดไปเปิดอยู่และอันแรกปิดอยู่เกียร์จะหมุนเล็กน้อยเพื่อให้สอดคล้องกับอันถัดไปและจากนั้นกระบวนการจะถูกทำซ้ำ การหมุนเวียนเล็กน้อยแต่ละครั้งเรียกว่าขั้นตอนโดยมีจำนวนขั้นตอนจำนวนเต็มทำให้หมุนเต็ม
ด้วยวิธีนี้มอเตอร์สามารถหมุนได้อย่างแม่นยำ สเต็ปเปอร์มอเตอร์ไม่หมุนอย่างต่อเนื่อง แต่จะหมุนตามขั้นตอน มี 4 ขดลวดกับ 90หรือมุมระหว่างกันคงที่บนสเตเตอร์ การเชื่อมต่อสเต็ปเปอร์มอเตอร์ถูกกำหนดโดยวิธีที่ขดลวดเชื่อมต่อกัน ในสเต็ปเปอร์มอเตอร์ไม่ได้เชื่อมต่อขดลวด มอเตอร์มี 90หรือขั้นตอนการหมุนโดยขดลวดจะได้รับพลังงานตามลำดับรอบการกำหนดทิศทางการหมุนของเพลา
การทำงานของมอเตอร์นี้แสดงโดยการใช้งานสวิตช์ ขดลวดจะเปิดใช้งานเป็นอนุกรมในช่วงเวลา 1 วินาที เพลาหมุน 90หรือทุกครั้งที่เปิดใช้งานขดลวดถัดไป แรงบิดความเร็วต่ำจะแปรผันตรงกับกระแส
ประเภทของ Stepper Motor
สเต็ปเปอร์มอเตอร์มีสามประเภทหลัก ได้แก่ :
- แม่เหล็กถาวร
- สเต็ปเปอร์ซิงโครนัสแบบไฮบริด
- ตัวแปรที่ไม่เต็มใจ
มอเตอร์แม่เหล็กถาวร
มอเตอร์แม่เหล็กถาวรใช้แม่เหล็กถาวร (PM) ในโรเตอร์และทำงานกับแรงดึงดูดหรือแรงผลักระหว่างโรเตอร์ PM และแม่เหล็กไฟฟ้าสเตเตอร์
นี่คือสเต็ปเปอร์มอเตอร์ประเภทที่พบมากที่สุดเมื่อเทียบกับสเต็ปเปอร์มอเตอร์ประเภทต่างๆที่มีอยู่ในตลาด มอเตอร์นี้มีแม่เหล็กถาวรในการสร้างมอเตอร์ มอเตอร์ชนิดนี้เรียกอีกอย่างว่ามอเตอร์กระป๋อง / กระป๋องสแต็ก ประโยชน์หลักของมอเตอร์สเต็ปนี้คือต้นทุนการผลิตที่น้อยลง สำหรับการปฏิวัติทุกครั้งจะมี 48-24 ขั้นตอน
สเต็ปเปอร์มอเตอร์แบบไม่ฝืนแปรผัน
มอเตอร์แบบไม่เต็มใจแบบแปรผัน (VR) มีโรเตอร์เหล็กธรรมดาและทำงานโดยอาศัยหลักการที่ว่าการฝืนน้อยที่สุดเกิดขึ้นโดยมีช่องว่างต่ำสุดดังนั้นจุดโรเตอร์จะถูกดึงดูดเข้าหาขั้วแม่เหล็กของสเตเตอร์
มอเตอร์แบบสเต็ปเปอร์เหมือนการฝืนตัวแปรเป็นประเภทพื้นฐานของมอเตอร์และถูกใช้เป็นเวลาหลายปีที่ผ่านมา ตามชื่อที่แนะนำตำแหน่งเชิงมุมของโรเตอร์ส่วนใหญ่ขึ้นอยู่กับการฝืนของวงจรแม่เหล็กที่อาจเกิดขึ้นระหว่างฟันของสเตเตอร์และโรเตอร์
มอเตอร์แบบซิงโครนัสแบบไฮบริด
มอเตอร์แบบไฮบริดสเต็ปได้รับการตั้งชื่อเนื่องจากใช้การผสมผสานระหว่างแม่เหล็กถาวร (PM) และเทคนิคการฝืนแบบแปรผัน (VR) เพื่อให้ได้กำลังสูงสุดในขนาดบรรจุภัณฑ์ขนาดเล็ก
ประเภทของมอเตอร์ที่ได้รับความนิยมมากที่สุดคือ ไฮบริดสเต็ปมอเตอร์ เนื่องจากให้ประสิทธิภาพที่ดีเมื่อเทียบกับโรเตอร์แม่เหล็กถาวรในแง่ของความเร็วความละเอียดขั้นตอนและแรงบิดในการยึด แต่สเต็ปเปอร์มอเตอร์ประเภทนี้มีราคาแพงเมื่อเทียบกับมอเตอร์สเต็ปเปอร์แม่เหล็กถาวร มอเตอร์นี้รวมคุณสมบัติของทั้งแม่เหล็กถาวรและมอเตอร์สเต็ปเปอร์แบบไม่เต็มใจ มอเตอร์เหล่านี้ใช้ในกรณีที่ต้องการมุมองศาน้อยกว่าเช่น 1.5, 1.8 และ 2.5 องศา
วิธีการเลือก Stepper Motor
ก่อนที่จะเลือกสเต็ปเปอร์มอเตอร์ตามความต้องการของคุณการตรวจสอบเส้นโค้งความเร็วแรงบิดของมอเตอร์เป็นสิ่งสำคัญมาก ดังนั้นข้อมูลนี้จึงมีอยู่จากผู้ออกแบบมอเตอร์และเป็นสัญลักษณ์กราฟิกของแรงบิดของมอเตอร์ที่ความเร็วที่กำหนด เส้นโค้งความเร็วแรงบิดของมอเตอร์ควรตรงกับความจำเป็นของการใช้งานอย่างใกล้ชิดมิฉะนั้นจะไม่สามารถรับประสิทธิภาพของระบบที่คาดไว้ได้
ประเภทของการเดินสายไฟ
มอเตอร์แบบสเต็ปเปอร์มักเป็นมอเตอร์สองเฟสเช่นเดียวกับขั้วเดียวหรือสองขั้ว สำหรับแต่ละเฟสในมอเตอร์แบบ unipolar จะมีขดลวดสองเส้น ที่นี่การเคาะตรงกลางเป็นจุดตะกั่วที่พบบ่อยระหว่างขดลวดสองเส้นเข้าหาเสา มอเตอร์เดียวมี 5 ถึง 8 สาย
ในการก่อสร้างซึ่งมีการแบ่งขั้วทั้งสองขั้วร่วมกันไม่ว่าจะเคาะตรงกลางมอเตอร์สเต็ปนี้มีสายนำหกตัว หากต๊าปกลางสองขั้วข้างในสั้นแสดงว่ามอเตอร์นี้มีสายนำห้าตัว Unipolar ที่มี 8 สายจะอำนวยความสะดวกทั้งการเชื่อมต่อแบบอนุกรมและแบบขนานในขณะที่มอเตอร์ที่มีตะกั่วห้าตัวหรือหกตะกั่วมีการเชื่อมต่อแบบอนุกรมของขดลวดสเตเตอร์ การทำงานของมอเตอร์ยูนิโพลาร์สามารถทำให้ง่ายขึ้นได้เนื่องจากในขณะที่ใช้งานไม่มีข้อกำหนดในการย้อนกลับการไหลของกระแสภายในวงจรขับเคลื่อนซึ่งเรียกว่ามอเตอร์สองขั้ว
ในสเต็ปเปอร์มอเตอร์สองขั้วสำหรับแต่ละขั้วจะมีขดลวดเดียว ทิศทางของอุปทานจำเป็นต้องเปลี่ยนไปตามวงจรขับเคลื่อนดังนั้นจึงมีความซับซ้อนดังนั้นมอเตอร์เหล่านี้จึงถูกเรียกว่ามอเตอร์ที่ไม่เหมือนใคร
Stepper Motor Control โดยการเปลี่ยนพัลส์นาฬิกา
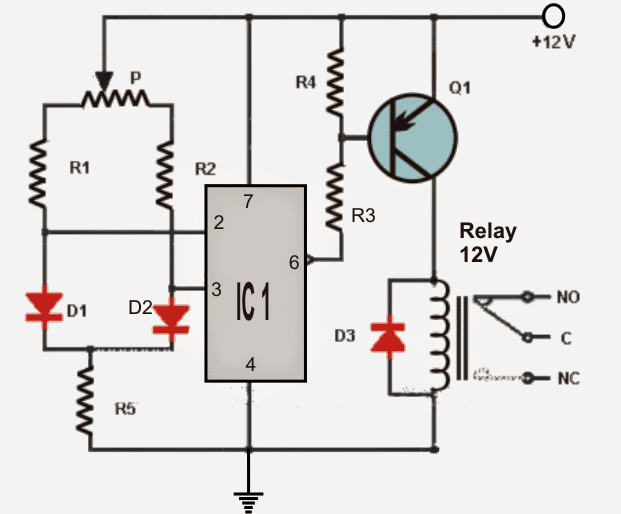
การควบคุมมอเตอร์สเต็ป วงจรเป็นวงจรที่เรียบง่ายและต้นทุนต่ำซึ่งส่วนใหญ่ใช้ในการใช้งานที่ใช้พลังงานต่ำ วงจรดังแสดงในรูปซึ่งประกอบด้วย 555 ตัวจับเวลา IC เป็นเครื่องสั่นแบบมัลติที่เสถียร ความถี่คำนวณโดยใช้ความสัมพันธ์ที่กำหนด
ความถี่ = 1 / T = 1.45 / (RA + 2RB) C โดยที่ RA = RB = R2 = R3 = 4.7 กิโลโอห์มและ C = C2 = 100 µF

Stepper Motor Control โดยการเปลี่ยนพัลส์นาฬิกา
เอาต์พุตของตัวจับเวลาจะใช้เป็นนาฬิกาสำหรับรองเท้าแตะคู่ ‘D’ (U4 และ U3) สองตัวที่กำหนดค่าเป็นตัวนับวงแหวน เมื่อเปิดเครื่องครั้งแรกจะมีการตั้งค่าฟลิปฟล็อปตัวแรกเท่านั้น (เช่นเอาต์พุต Q ที่พิน 5 ของ U3 จะอยู่ที่ลอจิก '1') และฟลิปฟล็อปอีกสามตัวจะถูกรีเซ็ต (เช่นเอาต์พุตของ Q อยู่ที่ลอจิก 0). เมื่อได้รับสัญญาณพัลส์นาฬิกาเอาต์พุตลอจิก ‘1’ ของฟลิปฟล็อปเครื่องแรกจะเลื่อนไปที่ฟลิปฟล็อปตัวที่สอง (พิน 9 ของ U3)
ดังนั้นเอาต์พุตลอจิก 1 จะเปลี่ยนเป็นวงกลมทุกครั้งที่พัลส์นาฬิกา เอาต์พุต Q ของฟลิปฟล็อปทั้งสี่ถูกขยายโดยอาร์เรย์ทรานซิสเตอร์ดาร์ลิงตันภายใน ULN2003 (U2) และเชื่อมต่อกับขดลวดสเต็ปเปอร์มอเตอร์สีส้มน้ำตาลเหลืองดำเป็น 16, 15,14, 13 ของ ULN2003 และสีแดงถึง + กับอุปทาน
จุดทั่วไปของขดลวดเชื่อมต่อกับแหล่งจ่ายไฟ + 12V DC ซึ่งเชื่อมต่อกับพิน 9 ของ ULN2003 ด้วย รหัสสีที่ใช้สำหรับขดลวดอาจแตกต่างกันไปในแต่ละยี่ห้อ เมื่อเปิดเครื่องสัญญาณควบคุมที่เชื่อมต่อกับพิน SET ของฟลิปฟล็อปตัวแรกและพิน CLR ของฟลิปฟล็อปอีกสามตัวจะทำงาน 'ต่ำ' (เนื่องจากวงจรเปิดเครื่องรีเซ็ตที่สร้างโดย R1 การรวมกัน -C1) เพื่อตั้งค่าฟลิปฟล็อปแรกและรีเซ็ตฟลิปฟล็อปสามตัวที่เหลือ
ในการรีเซ็ต Q1 ของ IC3 จะเป็น 'สูง' ในขณะที่เอาต์พุต Q อื่น ๆ ทั้งหมดจะเป็น 'ต่ำ' สามารถเปิดใช้งานการรีเซ็ตภายนอกได้โดยกดสวิตช์รีเซ็ต โดยการกดสวิตช์รีเซ็ตคุณสามารถหยุดมอเตอร์สเต็ปเปอร์ได้ มอเตอร์จะเริ่มหมุนไปในทิศทางเดียวกันอีกครั้งโดยปล่อยสวิตช์รีเซ็ต
ความแตกต่างระหว่าง Stepper Motor และ Servo Motor
เซอร์โวมอเตอร์เหมาะสำหรับการใช้งานที่มีแรงบิดและความเร็วสูงในขณะที่สเต็ปเปอร์มอเตอร์มีราคาไม่แพงดังนั้นจึงใช้ในกรณีที่มีแรงบิดในการยึดสูงการเร่งความเร็วด้วยระดับต่ำถึงปานกลางจำเป็นต้องมีความยืดหยุ่นในการทำงานแบบวงปิดแบบเปิด ความแตกต่างระหว่างสเต็ปเปอร์มอเตอร์และเซอร์โวมอเตอร์มีดังต่อไปนี้
| สเต็ปเปอร์มอเตอร์ | เซอร์โวมอเตอร์ |
| มอเตอร์ที่เคลื่อนที่ในขั้นตอนไม่ต่อเนื่องเรียกว่าสเต็ปเปอร์มอเตอร์ | เซอร์โวมอเตอร์เป็นมอเตอร์วงปิดชนิดหนึ่งที่เชื่อมต่อกับเครื่องเข้ารหัสเพื่อให้การตอบสนองและตำแหน่งความเร็ว
|
| สเต็ปเปอร์มอเตอร์ใช้ในกรณีที่การควบคุมและความแม่นยำเป็นลำดับความสำคัญหลัก | ใช้เซอร์โวมอเตอร์โดยที่ความเร็วเป็นลำดับความสำคัญหลัก
|
| จำนวนเสาโดยรวมของสเต็ปเปอร์มอเตอร์มีตั้งแต่ 50 ถึง 100 | จำนวนเสาโดยรวมของเซอร์โวมอเตอร์มีตั้งแต่ 4 ถึง 12 |
| ในระบบวงปิดมอเตอร์เหล่านี้จะเคลื่อนที่ด้วยชีพจรที่สม่ำเสมอ | มอเตอร์เหล่านี้จำเป็นต้องมีตัวเข้ารหัสเพื่อเปลี่ยนพัลส์เพื่อควบคุมตำแหน่ง
|
| แรงบิดสูงในความเร็วที่น้อยลง | แรงบิดต่ำในความเร็วสูง |
| เวลากำหนดตำแหน่งเร็วขึ้นตลอดจังหวะสั้น ๆ | เวลาวางตำแหน่งเร็วขึ้นตลอดจังหวะยาว |
| การเคลื่อนไหวของความเฉื่อยที่มีความอดทนสูง | การเคลื่อนไหวของความเฉื่อยที่มีความอดทนต่ำ |
| มอเตอร์นี้เหมาะสำหรับกลไกที่มีความแข็งแกร่งต่ำเช่นรอกและสายพาน | ไม่เหมาะสำหรับกลไกที่มีความแข็งแกร่งน้อย |
| การตอบสนองสูง | การตอบสนองอยู่ในระดับต่ำ |
| สิ่งเหล่านี้ใช้สำหรับโหลดที่ผันผวน | สิ่งเหล่านี้ไม่ได้ใช้สำหรับโหลดที่ผันผวน |
| ไม่จำเป็นต้องปรับอัตราขยาย / จูน | จำเป็นต้องมีการปรับอัตราขยาย / จูน |
Stepper Motor กับ DC Motor
ทั้งสเต็ปเปอร์และมอเตอร์กระแสตรงถูกใช้ในงานอุตสาหกรรมที่แตกต่างกัน แต่ความแตกต่างหลักระหว่างมอเตอร์ทั้งสองนี้ค่อนข้างสับสนเล็กน้อย ที่นี่เรากำลังแสดงลักษณะทั่วไปบางประการระหว่างการออกแบบทั้งสองนี้ แต่ละลักษณะจะกล่าวถึงด้านล่าง
ลักษณะเฉพาะ | สเต็ปเปอร์มอเตอร์ | มอเตอร์กระแสตรง |
| ลักษณะการควบคุม | ง่ายและใช้ไมโครคอนโทรลเลอร์ | ง่ายและไม่จำเป็นต้องมีอะไรพิเศษ |
| ช่วงความเร็ว | ต่ำตั้งแต่ 200 ถึง 2,000 รอบต่อนาที | ปานกลาง |
| ความน่าเชื่อถือ | สูง | ปานกลาง |
| ประสิทธิภาพ | ต่ำ | สูง |
| ลักษณะแรงบิดหรือความเร็ว | แรงบิดสูงสุดด้วยความเร็วที่น้อยลง | แรงบิดสูงด้วยความเร็วที่น้อยลง |
| ค่าใช้จ่าย | ต่ำ | ต่ำ |
พารามิเตอร์ของ Stepper Motor
พารามิเตอร์มอเตอร์สเต็ปส่วนใหญ่ประกอบด้วยมุมของขั้นตอนขั้นตอนสำหรับการปฏิวัติแต่ละครั้งขั้นตอนในแต่ละวินาทีและรอบต่อนาที
ขั้นตอนที่มุม
มุมขั้นตอนของสเต็ปเปอร์มอเตอร์สามารถกำหนดให้เป็นมุมที่โรเตอร์ของมอเตอร์หมุนได้เมื่อมีการกำหนดพัลส์เดี่ยวให้กับอินพุตของสเตเตอร์ ความละเอียดของมอเตอร์สามารถกำหนดได้เป็นจำนวนขั้นตอนของมอเตอร์และจำนวนรอบการหมุนของโรเตอร์
ความละเอียด = จำนวนขั้นตอน / จำนวนการปฏิวัติของโรเตอร์
การจัดเรียงของมอเตอร์สามารถตัดสินใจได้โดยใช้มุมขั้นตอนและแสดงเป็นองศา ความละเอียดของมอเตอร์ (หมายเลขขั้นตอน) คือหมายเลข ของขั้นตอนที่เกิดขึ้นภายในการปฏิวัติครั้งเดียวของโรเตอร์ เมื่อมุมขั้นตอนของมอเตอร์มีขนาดเล็กความละเอียดจะสูงสำหรับการจัดเรียงมอเตอร์นี้
ความแม่นยำของการจัดเรียงวัตถุผ่านมอเตอร์นี้ส่วนใหญ่ขึ้นอยู่กับความละเอียด เมื่อความละเอียดสูงแล้วความแม่นยำจะต่ำ
มอเตอร์ที่มีความแม่นยำบางตัวสามารถสร้างขั้นตอนได้ 1,000 ขั้นตอนภายในการปฏิวัติครั้งเดียวรวมถึงมุมขั้นบันได 0.36 องศา มอเตอร์ทั่วไปมีมุมขั้นตอน 1.8 องศาและ 200 ขั้นสำหรับการปฏิวัติแต่ละครั้ง มุมขั้นตอนต่างๆเช่น 15 องศา 45 องศาและ 90 องศาเป็นเรื่องปกติมากในมอเตอร์ทั่วไป จำนวนมุมสามารถเปลี่ยนได้จากสองถึงหกมุมและสามารถเข้าถึงมุมขั้นตอนเล็ก ๆ ได้ผ่านชิ้นส่วนเสาแบบเจาะรู
ขั้นตอนสำหรับการปฏิวัติแต่ละครั้ง
ขั้นตอนสำหรับแต่ละความละเอียดสามารถกำหนดเป็นจำนวนมุมขั้นตอนที่จำเป็นสำหรับการปฏิวัติทั้งหมด สูตรนี้คือ 360 ° / Step Angle
ขั้นตอนในแต่ละวินาที
พารามิเตอร์ประเภทนี้ส่วนใหญ่จะใช้สำหรับการวัดจำนวนก้าวที่ครอบคลุมภายในแต่ละวินาที
ปฏิวัติต่อนาที
RPM คือการปฏิวัติต่อนาที ใช้เพื่อวัดความถี่ของการปฏิวัติ ดังนั้นโดยใช้พารามิเตอร์นี้เราสามารถคำนวณจำนวนรอบในหนึ่งนาทีได้ ความสัมพันธ์หลักระหว่างพารามิเตอร์ของสเต็ปเปอร์มอเตอร์มีดังต่อไปนี้
ขั้นตอนในแต่ละวินาที = การปฏิวัติต่อนาที x ขั้นตอนต่อการปฏิวัติ / 60
Stepper Motor เชื่อมต่อกับไมโครคอนโทรลเลอร์ 8051
การเชื่อมต่อ Stepper motor กับ 8051 นั้นง่ายมากโดยใช้โหมดสามโหมดเช่น wave drive, full step drive & half step drive โดยให้ 0 & 1 เข้ากับสายไฟสี่เส้นของมอเตอร์ตามโหมดขับเคลื่อนที่เราต้องเลือกสำหรับการใช้งานมอเตอร์นี้
สายไฟที่เหลืออีกสองเส้นจะต้องเชื่อมต่อกับแหล่งจ่ายแรงดันไฟฟ้า ที่นี่ใช้มอเตอร์แบบ unipolar โดยที่ปลายทั้งสี่ของขดลวดเชื่อมต่อกับสี่พินหลักของพอร์ต -2 ในไมโครคอนโทรลเลอร์โดยใช้ ULN2003A
ไมโครคอนโทรลเลอร์นี้จ่ายกระแสไม่เพียงพอที่จะขับเคลื่อนขดลวดดังนั้น IC ไดรเวอร์ปัจจุบันจึงชอบ ULN2003A ต้องใช้ ULN2003A และเป็นชุดของทรานซิสเตอร์ NPN Darlington 7 คู่ การออกแบบคู่ดาร์ลิงตันสามารถทำได้ผ่านทรานซิสเตอร์สองขั้วซึ่งเชื่อมต่อกันเพื่อให้ได้การขยายกระแสสูงสุด
ใน IC ไดรเวอร์ ULN2003A พินอินพุตคือ 7 พินเอาต์พุตคือ 7 โดยที่สองพินสำหรับพาวเวอร์ซัพพลายและขั้วกราวด์ ที่นี่ใช้พิน 4 อินพุตและ 4 เอาต์พุต L293D IC เป็นอีกทางเลือกหนึ่งของ ULN2003A ยังใช้สำหรับการขยายกระแส
คุณต้องสังเกตสายไฟทั่วไปสองเส้นและสายขดลวดสี่เส้นอย่างระมัดระวังมิฉะนั้นมอเตอร์สเต็ปเปอร์จะไม่หมุน สามารถสังเกตได้โดยการวัดความต้านทานผ่านมัลติมิเตอร์ แต่มัลติมิเตอร์จะไม่แสดงค่าที่อ่านได้ระหว่างสายไฟทั้งสองเฟส เมื่อลวดทั่วไปและสายไฟอีกสองเส้นอยู่ในเฟสที่เท่ากันแล้วจะต้องแสดงความต้านทานที่ใกล้เคียงกันในขณะที่จุดสิ้นสุดของขดลวดทั้งสองในเฟสที่ใกล้เคียงกันจะแสดงความต้านทานสองเท่าเมื่อเทียบกับความต้านทานระหว่างจุดร่วมและจุดสิ้นสุดหนึ่งจุด
การแก้ไขปัญหา
- การแก้ไขปัญหาเป็นกระบวนการตรวจสอบสถานะมอเตอร์ว่ามอเตอร์ทำงานหรือไม่ รายการตรวจสอบต่อไปนี้ใช้เพื่อแก้ไขปัญหาสเต็ปเปอร์มอเตอร์
- ขั้นแรกให้ตรวจสอบการเชื่อมต่อรวมถึงรหัสของวงจร
- ถ้าเป็นไปได้ให้ตรวจสอบในครั้งต่อไปว่ามอเตอร์ได้รับแรงดันไฟฟ้าที่เหมาะสมหรือมิฉะนั้นก็สั่นเพียง แต่ไม่หมุน
- หากแหล่งจ่ายแรงดันไฟฟ้าดีให้ตรวจสอบจุดสิ้นสุดของขดลวดทั้งสี่ซึ่งเชื่อมโยงกับ ULN2003A IC
- ขั้นแรกให้ค้นหาจุดสิ้นสุดทั่วไปสองจุดและแก้ไขเป็นแหล่งจ่ายไฟ 12v หลังจากนั้นแก้ไขสายไฟสี่เส้นที่เหลือเป็น IC ULN2003A จนกว่ามอเตอร์สตาร์ทจะเริ่มทำงานให้ลองใช้ชุดค่าผสมที่เป็นไปได้ทั้งหมด หากการเชื่อมต่อไม่ถูกต้องมอเตอร์นี้จะสั่นแทนการหมุน
Stepper Motors สามารถทำงานได้อย่างต่อเนื่องหรือไม่?
โดยทั่วไปมอเตอร์ทั้งหมดจะทำงานหรือหมุนอย่างต่อเนื่อง แต่มอเตอร์ส่วนใหญ่ไม่สามารถหยุดทำงานได้ในขณะที่กำลังทำงานอยู่เมื่อคุณพยายาม จำกัด เพลาของมอเตอร์เมื่ออยู่ภายใต้แหล่งจ่ายไฟมันจะไหม้หรือแตก
หรืออีกวิธีหนึ่งคือสเต็ปเปอร์มอเตอร์ได้รับการออกแบบมาเพื่อสร้างขั้นตอนที่ไม่ต่อเนื่องจากนั้นรอขั้นตอนอีกครั้งและอยู่ที่นั่น หากเราต้องการให้มอเตอร์อยู่ในตำแหน่งเดียวเป็นเวลาน้อยลงก่อนที่จะเหยียบอีกครั้งมันจะดูเหมือนหมุนไปเรื่อย ๆ การใช้พลังงานของมอเตอร์เหล่านี้สูง แต่การกระจายกำลังส่วนใหญ่เกิดขึ้นเมื่อมอเตอร์หยุดทำงานหรือออกแบบมาไม่ดีก็มีโอกาสที่จะเกิดความร้อนสูงเกินไป ด้วยเหตุนี้การจ่ายกระแสของมอเตอร์จึงมักจะลดลงเมื่อมอเตอร์อยู่ในท่าจับเป็นเวลานานขึ้น
สาเหตุหลักคือเมื่อมอเตอร์หมุนแล้วชิ้นส่วนพลังงานไฟฟ้าขาเข้าสามารถเปลี่ยนเป็นพลังงานกลได้ เมื่อมอเตอร์หยุดทำงานในขณะที่กำลังหมุนกำลังอินพุตทั้งหมดสามารถเปลี่ยนเป็นความร้อนที่ด้านในของขดลวด
ข้อดี
ข้อดีของมอเตอร์สตาร์ท รวมสิ่งต่อไปนี้
- ความทนทาน
- โครงสร้างที่เรียบง่าย
- สามารถทำงานในระบบควบคุมวงเปิด
- การบำรุงรักษาต่ำ
- ใช้งานได้ในทุกสถานการณ์
- ความน่าเชื่อถือสูง
- มุมการหมุนของมอเตอร์เป็นสัดส่วนกับพัลส์อินพุต
- มอเตอร์มีแรงบิดเต็มที่เมื่อหยุดนิ่ง
- ตำแหน่งที่แม่นยำและความสามารถในการเคลื่อนที่ซ้ำได้เนื่องจากมอเตอร์สเต็ปเปอร์ที่ดีมีความแม่นยำ 3-5% ของขั้นตอนและข้อผิดพลาดนี้จะไม่สะสมจากขั้นตอนหนึ่งไปอีกขั้น
- ตอบสนองต่อการสตาร์ทหยุดและถอยหลังได้ดีเยี่ยม
- เชื่อถือได้มากเนื่องจากไม่มีแปรงสัมผัสในมอเตอร์ ดังนั้นอายุการใช้งานของมอเตอร์จึงขึ้นอยู่กับอายุการใช้งานของแบริ่ง
- การตอบสนองของมอเตอร์ต่อพัลส์อินพุตแบบดิจิทัลให้การควบคุมแบบลูปเปิดทำให้มอเตอร์ควบคุมได้ง่ายขึ้นและเสียค่าใช้จ่ายน้อยลง
- เป็นไปได้ที่จะหมุนซิงโครนัสความเร็วต่ำมากโดยมีโหลดที่เชื่อมต่อโดยตรงกับเพลา
- สามารถรับรู้ความเร็วในการหมุนได้หลากหลายเนื่องจากความเร็วเป็นสัดส่วนกับความถี่ของพัลส์อินพุต
ข้อเสีย
ข้อเสียของมอเตอร์สเต็ปเปอร์ รวมสิ่งต่อไปนี้
- ประสิทธิภาพต่ำ
- แรงบิดของมอเตอร์จะลดลงอย่างรวดเร็วด้วยความเร็ว
- ความแม่นยำอยู่ในระดับต่ำ
- ข้อเสนอแนะไม่ได้ใช้เพื่อระบุขั้นตอนที่อาจพลาดไป
- แรงบิดเล็กน้อยต่ออัตราส่วนความเฉื่อย
- มีเสียงดังมาก
- หากมอเตอร์ไม่ได้รับการควบคุมอย่างเหมาะสมอาจเกิดการสั่นพ้องได้
- การทำงานของมอเตอร์นี้ไม่ใช่เรื่องง่ายที่ความเร็วสูงมาก
- จำเป็นต้องมีวงจรควบคุมเฉพาะ
- เมื่อเทียบกับมอเตอร์กระแสตรงจะใช้กระแสไฟฟ้ามากกว่า
การใช้งาน
การใช้งานของมอเตอร์สเต็ปเปอร์ รวมสิ่งต่อไปนี้
- เครื่องจักรอุตสาหกรรม - มอเตอร์สเต็ปเปอร์ใช้ในมาตรวัดยานยนต์และอุปกรณ์การผลิตอัตโนมัติของเครื่องมือกล
- ความปลอดภัย - ผลิตภัณฑ์เฝ้าระวังใหม่สำหรับอุตสาหกรรมความปลอดภัย
- การแพทย์ - มอเตอร์สเต็ปเปอร์ถูกใช้ในเครื่องสแกนทางการแพทย์เครื่องเก็บตัวอย่างและยังพบในการถ่ายภาพฟันดิจิตอลปั๊มของเหลวเครื่องช่วยหายใจและเครื่องวิเคราะห์เลือด
- เครื่องใช้ไฟฟ้า - สเต็ปเปอร์มอเตอร์ในกล้องสำหรับโฟกัสอัตโนมัติของกล้องดิจิตอลและฟังก์ชั่นซูม
และยังมีแอพพลิเคชั่นเครื่องจักรทางธุรกิจแอพพลิเคชั่นอุปกรณ์ต่อพ่วงคอมพิวเตอร์
ดังนั้นทั้งหมดนี้เป็นข้อมูลเกี่ยวกับ ภาพรวมของสเต็ปเปอร์มอเตอร์ เช่นการก่อสร้างหลักการทำงานความแตกต่างข้อดีข้อเสียและการใช้งาน ตอนนี้คุณมีความคิดเกี่ยวกับประเภทของซุปเปอร์มอเตอร์และการใช้งานแล้วหากคุณมีข้อสงสัยเกี่ยวกับหัวข้อนี้หรือเกี่ยวกับไฟฟ้าและ โครงการอิเล็กทรอนิกส์ แสดงความคิดเห็นด้านล่าง
เครดิตภาพ
- Stepper Motor โดย MST




![สร้างวงจร Buck Converter อย่างง่าย [Step Down Converter]](https://electronics.jf-parede.pt/img/3-phase-power/D0/build-a-simple-buck-converter-circuit-step-down-converter-1.jpg)




{kind=link}