ในช่วงปี 1840 เองการพัฒนามอเตอร์เหนี่ยวนำเชิงเส้นได้เริ่มต้นโดย Charles Wheatstone ที่ลอนดอน แต่ดูเหมือนว่าจะทำไม่ได้ ในขณะที่ในปีพ. ศ. 2478 Hermann Kemper ได้นำรูปแบบการปฏิบัติงานมาสู่การพัฒนาและ Eric เปิดตัวเวอร์ชันปฏิบัติการขนาดเต็มในปี พ.ศ. 2483 หลังจากนั้นอุปกรณ์นี้ก็ถูกนำไปใช้ในหลาย ๆ แอปพลิเคชันในหลายอุตสาหกรรม บทความนี้อธิบายเชิงเส้นอย่างชัดเจน มอเตอร์เหนี่ยวนำ หลักการทำงานประสิทธิภาพการออกแบบการก่อสร้างข้อดีและข้อเสียและการใช้งานที่สำคัญ ให้เราดำดิ่งสู่แนวคิด
มอเตอร์เหนี่ยวนำเชิงเส้นคืออะไร?
Linear Induction Motor ย่อมาจาก LIM และนี่คือรุ่นปรับปรุงของมอเตอร์เหนี่ยวนำแบบหมุนโดยที่เอาท์พุทเป็นการเคลื่อนที่เชิงแปลเชิงเส้นแทนการเคลื่อนที่แบบหมุน อุปกรณ์นี้สร้างการเคลื่อนที่เชิงเส้นและแรงอื่นที่ไม่ใช่แรงบิดหมุน การออกแบบและการทำงานของเส้นตรง การเหนี่ยวนำ มอเตอร์สามารถแสดงได้ในรูปด้านล่างโดยสร้างการตัดที่มีรูปทรงรัศมีในการเหนี่ยวนำการหมุนเวียนและปรับระดับส่วน
เอาท์พุทเป็นสเตเตอร์ปรับระดับหรือด้านบนมีการเคลือบด้วยเหล็กซึ่งสิ่งเหล่านี้มีเสาหลายสามเฟสที่คดเคี้ยวที่มีตัวนำซึ่งอยู่ใน 900มุมกับทิศทางการเคลื่อนไหว นอกจากนี้ยังประกอบด้วยขดลวดชนิดกระรอกในขณะที่โดยทั่วไปจะมาพร้อมกับแผ่นอลูมิเนียมหรือทองแดงที่ไม่มีที่สิ้นสุดซึ่งเก็บไว้บนเหล็กชุบแข็ง
ไม่ว่าจะเป็นชื่ออุปกรณ์ใดก็ตามไม่ใช่ว่ามอเตอร์เหนี่ยวนำเชิงเส้นทั้งหมดจะสร้างการเคลื่อนที่เชิงเส้นอุปกรณ์ที่สร้างขึ้นเพียงไม่กี่ชิ้นจะถูกใช้เพื่อส่งมอบการปฏิวัติที่มีเส้นผ่านศูนย์กลางที่ดีเยี่ยมและการใช้ประโยชน์จากส่วนหลักที่ไม่มีที่สิ้นสุดนั้นมีราคาแพง
ออกแบบ
โครงสร้างพื้นฐานและ การออกแบบมอเตอร์เหนี่ยวนำเชิงเส้น เกือบจะเหมือนกับ การเหนี่ยวนำสามเฟส มอเตอร์แม้ว่ามันจะไม่เหมือนกับมอเตอร์เหนี่ยวนำทั่วไปก็ตาม เมื่อเกิดการตัดขึ้นในส่วนสเตเตอร์ของมอเตอร์เหนี่ยวนำโพลีเฟสและวางบนพื้นผิวเรียบสิ่งนี้จะสร้างส่วนหลักของมอเตอร์เหนี่ยวนำเชิงเส้น ในทำนองเดียวกันเมื่อระบบตัดเฉือนเกิดขึ้นในส่วนโรเตอร์ของมอเตอร์เหนี่ยวนำโพลีเฟสและวางบนพื้นผิวเรียบจากนั้นจะสร้างส่วนรองของมอเตอร์เหนี่ยวนำเชิงเส้น
การก่อสร้างมอเตอร์เหนี่ยวนำเชิงเส้น นอกจากนี้ยังมีมอเตอร์เหนี่ยวนำเชิงเส้นอีกรุ่นหนึ่งที่ใช้เพื่อเพิ่มประสิทธิภาพและสิ่งนี้เรียกว่า DLIM ซึ่งเป็นมอเตอร์เหนี่ยวนำเชิงเส้นสองด้าน โมเดลนี้มีส่วนหลักที่วางอยู่ที่ปลายอีกด้านหนึ่งของส่วนรอง การออกแบบนี้ใช้เพื่อเพิ่มการใช้ประโยชน์ของฟลักซ์ทั้งด้านหลักและด้านทุติยภูมิ นี้เป็น การสร้างมอเตอร์เหนี่ยวนำเชิงเส้น .
หลักการทำงานของมอเตอร์เหนี่ยวนำเชิงเส้น
ส่วนด้านล่างให้คำอธิบายที่ชัดเจนเกี่ยวกับไฟล์ การทำงานของมอเตอร์เหนี่ยวนำเชิงเส้น .
ที่นี่เมื่อส่วนหลักของมอเตอร์ได้รับพลังงานโดยใช้กำลังไฟฟ้าสามเฟสที่สมดุลจะมีการเคลื่อนที่ของฟลักซ์ตลอดความยาวของส่วนหลัก การเคลื่อนที่เชิงเส้นของสนามแม่เหล็กนี้เท่ากับสนามแม่เหล็กหมุนในส่วนสเตเตอร์ของมอเตอร์เหนี่ยวนำสามเฟส
ด้วยสิ่งนี้จะมีการเหนี่ยวนำกระแสไฟฟ้าในตัวนำของขดลวดทุติยภูมิเนื่องจากการเคลื่อนที่เปรียบเทียบระหว่างตัวนำและ การเคลื่อนไหวของฟลักซ์ . กระแสไฟฟ้าที่เหนี่ยวนำจะเชื่อมต่อกับการเคลื่อนที่ของฟลักซ์เพื่อสร้างแรงผลักเชิงเส้นอย่างใดอย่างหนึ่งและแสดงโดย
Vs = 2tfs m / วินาที
เมื่อส่วนปฐมภูมิถูกทำให้คงที่และส่วนที่สองมีการเคลื่อนที่แรงจะดึงส่วนรองไปในทิศทางของมันเองและส่งผลให้เกิดการเคลื่อนที่เป็นเส้นตรงที่จำเป็น เมื่อมีการจัดหาแหล่งจ่ายไฟให้กับระบบฟิลด์ที่สร้างขึ้นจะจัดเตรียมฟิลด์เคลื่อนที่เชิงเส้นซึ่งแสดงความเร็วตามสมการที่กล่าวถึงข้างต้น
ในสมการ 'fs' จะสอดคล้องกับจำนวนความถี่ของแหล่งจ่ายที่วัดเป็นเฮิรตซ์
'Vs' สอดคล้องกับสนามเคลื่อนที่เชิงเส้นที่วัดเป็น m / วินาที
't' สอดคล้องกับระยะห่างของเสาเชิงเส้นซึ่งหมายถึงระยะห่างระหว่างขั้วถึงขั้วที่วัดเป็นเมตร
V = (1-s) Vs
ในความสอดคล้องกับเหตุผลเดียวกันในสภาพของมอเตอร์เหนี่ยวนำนักวิ่งรองไม่ถือความเร็วเดียวกันกับค่าความเร็วของ สนามแม่เหล็ก . ด้วยเหตุนี้จึงทำให้เกิดสลิป
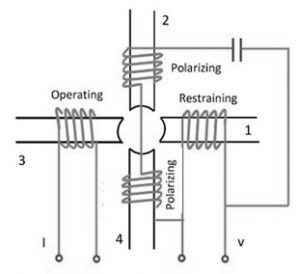
แผนภาพมอเตอร์เหนี่ยวนำเชิงเส้น แสดงดังต่อไปนี้:

ลักษณะของมอเตอร์เหนี่ยวนำเชิงเส้น
ลักษณะ LIM บางประการ ได้แก่ :
สิ้นสุดเอฟเฟกต์
แตกต่างจากมอเตอร์ประเภทเหนี่ยวนำแบบวงกลม LIM มีลักษณะที่เรียกว่า“ End Effect” ผลสุดท้ายประกอบด้วยประสิทธิภาพและการสูญเสียประสิทธิภาพซึ่งเป็นผลมาจากพลังงานแม่เหล็กที่พัดพาไปและลดลงที่ตอนท้ายของส่วนปฐมภูมิผ่านการเคลื่อนที่สัมพัทธ์ของส่วนปฐมภูมิและทุติยภูมิ
เฉพาะในส่วนรองเท่านั้นการทำงานของอุปกรณ์ดูเหมือนจะเหมือนกับเครื่องโรตารี่โดยต้องแยกออกจากกันเกือบสองขั้ว แต่ต้องลดแรงผลักหลักเพียงเล็กน้อยซึ่งเกิดขึ้นที่สลิปต่ำ แต่ยังคงเป็น 8 หรือมากกว่า เสาอีกต่อไป ด้วยการมีอยู่ของเอฟเฟกต์สุดท้ายอุปกรณ์ LIM จึงไม่สามารถวิ่งแสงได้ในขณะที่มอเตอร์เหนี่ยวนำชนิดทั่วไปมีความสามารถนี้ในการใช้งานมอเตอร์ที่มีฟิลด์ซิงโครนัสที่ใกล้กว่าภายใต้สภาวะโหลดน้อยที่สุด ตรงข้ามกับสิ่งนี้ผลสุดท้ายจะสร้างความสูญเสียที่สอดคล้องกันโดยมีมอเตอร์เชิงเส้น
แรงขับ
ไดรฟ์ที่เกิดจากอุปกรณ์ LIM นั้นเกือบจะเหมือนกับของมอเตอร์เหนี่ยวนำทั่วไป แรงขับเคลื่อนเหล่านี้แสดงถึงเส้นโค้งลักษณะเดียวกันโดยประมาณเช่นเดียวกับสลิปแม้ว่าจะถูกปรับโดยเอฟเฟ็กต์สุดท้าย สิ่งนี้เรียกว่าเป็นความพยายามในการดึง แสดงโดย
F = Pg / Vs วัดเป็นนิวตัน
ลอย
นอกจากนี้ในทางตรงกันข้ามกับมอเตอร์โรตารี่อุปกรณ์ LIM มีแรงลอยตัวแบบไดนามิกซึ่งมีค่าเป็นศูนย์ที่ค่าสลิป '0' และจะสร้างช่องว่างจำนวนคงที่โดยประมาณเมื่อสลิปเพิ่มขึ้นในทิศทางใดทิศทางหนึ่ง สิ่งนี้เกิดขึ้นเฉพาะในมอเตอร์ด้านเดียวและโดยทั่วไปลักษณะนี้จะไม่เกิดขึ้นเมื่อใช้แผ่นรองรับเหล็กสำหรับส่วนรองเนื่องจากจะสร้างแรงดึงดูดที่เอาชนะแรงกดยก
เอฟเฟกต์ขอบขวาง
มอเตอร์เหนี่ยวนำเชิงเส้นยังแสดงเอฟเฟกต์ขอบขวางซึ่งก็คือเส้นทางปัจจุบันที่อยู่ในทิศทางเดียวกันของการเคลื่อนที่ทำให้เกิดการสูญเสียและเนื่องจากเส้นทางเหล่านี้จะมีการลดแรงขับที่มีประสิทธิภาพ เนื่องจากเอฟเฟกต์ขอบตามขวางนี้เกิดขึ้น
ประสิทธิภาพ
ประสิทธิภาพของมอเตอร์เหนี่ยวนำเชิงเส้น สามารถทราบได้จากทฤษฎีที่อธิบายด้านล่างซึ่งแสดงความเร็วซิงโครนัสของคลื่นเคลื่อนที่
Vs = 2f (ส่วนของขั้วเชิงเส้น) …… ..m / s
'f' สอดคล้องกับความถี่ที่ให้มาซึ่งวัดได้ในเฮิรตซ์
ในกรณีของมอเตอร์เหนี่ยวนำแบบหมุนความเร็วของส่วนรองใน LIM จะน้อยกว่าความเร็วซิงโครนัสและกำหนดโดย
Vr = Vs (1-s), 's' คือสลิป LIM และเป็น
S = (Vs - Vr) / Vs
แรงเชิงเส้นถูกกำหนดโดย
F = พลังของช่องว่างอากาศ / Vs
รูปร่างเส้นโค้งความเร็วแรงขับของ LIM เกือบจะเหมือนกับของเส้นโค้งแรงบิดความเร็ว v / s ของมอเตอร์เหนี่ยวนำแบบหมุน เมื่อมีการเปรียบเทียบระหว่าง LIM กับมอเตอร์เหนี่ยวนำแบบหมุนมอเตอร์เหนี่ยวนำเชิงเส้นต้องการช่องว่างอากาศที่เพิ่มขึ้นและด้วยเหตุนี้จะมีกระแสแม่เหล็กเพิ่มขึ้นและปัจจัยต่างๆเช่นประสิทธิภาพและตัวประกอบกำลังจะน้อย
ในกรณีของ RIM พื้นที่ของส่วนสเตเตอร์และโรเตอร์จะใกล้เคียงกันในขณะที่ส่วน LIM จะสั้นกว่าส่วนอื่น ๆ ด้วยความเร็วคงที่ส่วนที่สั้นกว่าจะมีทางเดินต่อเนื่องมากกว่าส่วนอื่น ๆ
ข้อดีและข้อเสีย
ข้อดีของมอเตอร์เหนี่ยวนำเชิงเส้น คือ:
ประโยชน์ที่สำคัญของ LIM คือ:
- ไม่มีแรงดึงดูดแม่เหล็กในขณะประกอบ ด้วยเหตุผลที่อุปกรณ์ LIM ไม่มีแม่เหล็กถาวรจึงไม่มีแรงดึงดูดในขณะประกอบระบบ
- มอเตอร์เหนี่ยวนำเชิงเส้นยังมีข้อได้เปรียบในการเดินทางในระยะยาว อุปกรณ์เหล่านี้ส่วนใหญ่ใช้สำหรับการใช้งานที่มีความยาวยาวเนื่องจากส่วนรองไม่รวมอยู่ในแม่เหล็กถาวร การไม่มีแม่เหล็กในส่วนที่สองช่วยให้อุปกรณ์เหล่านี้มีราคาไม่แพงเนื่องจากราคาของอุปกรณ์นั้นอยู่ที่การพัฒนาแทร็กแม่เหล็กเป็นสำคัญ
- มีประโยชน์อย่างมีประสิทธิภาพสำหรับงานหนัก มอเตอร์เหนี่ยวนำเชิงเส้นส่วนใหญ่จะใช้ในสภาพมอเตอร์เชิงเส้นแรงดันสูงซึ่งมีอยู่โดยมีพิกัดแรงคงที่เกือบ 25gms ของการเร่งและบางร้อยปอนด์
ข้อเสียของมอเตอร์เหนี่ยวนำเชิงเส้น คือ:
- การสร้างอุปกรณ์ LIM ค่อนข้างซับซ้อนเนื่องจากต้องใช้อัลกอริธึมการควบคุมที่ซับซ้อน
- สิ่งเหล่านี้มีแรงดึงดูดเพิ่มขึ้นในขณะทำการ
- ไม่แสดงแรงในเวลาที่หยุดนิ่ง
- ขนาดทางกายภาพที่เพิ่มขึ้นของอุปกรณ์หมายความว่าขนาดบรรจุภัณฑ์มีมากขึ้น
- ต้องใช้พลังงานมากขึ้นสำหรับการทำงาน เมื่อเปรียบเทียบกับมอเตอร์เชิงเส้นแม่เหล็กถาวรประสิทธิภาพจะน้อยกว่าและสร้างความร้อนได้มากกว่า สิ่งนี้ต้องการอุปกรณ์ระบายความร้อนด้วยน้ำเพิ่มเติมเพื่อรวมอยู่ในการก่อสร้าง
การใช้งานมอเตอร์เหนี่ยวนำเชิงเส้น
การใช้ประโยชน์เฉพาะของมอเตอร์เหนี่ยวนำเชิงเส้นสามารถพบได้ในการใช้งานเช่น
- สายพานลำเลียงโลหะ
- อุปกรณ์ควบคุมเครื่องจักรกล
- ตัวกระตุ้นสำหรับเซอร์กิตเบรกเกอร์ความเร็วสูง
- แอพพลิเคชั่นเพิ่มรถรับส่ง
โดยรวมแล้วทั้งหมดนี้เกี่ยวกับแนวคิดของ Linear Induction Motors บทความนี้ให้คำอธิบายที่ชัดเจนเกี่ยวกับหลักการของมอเตอร์เหนี่ยวนำเชิงเส้นการออกแบบการทำงานการใช้ประโยชน์และข้อเสีย จำเป็นต้องทราบเพิ่มเติมว่าความเร็ว v / s ระยะห่างของเสาเป็นอย่างไร ลักษณะเฉพาะของมอเตอร์เหนี่ยวนำเชิงเส้น แสดง?