
มอเตอร์เหนี่ยวนำ
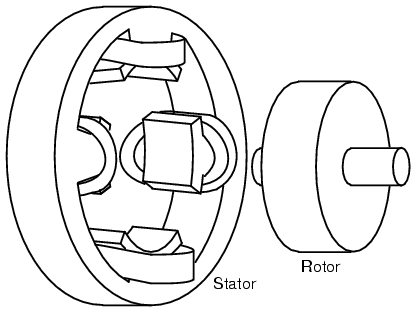
มอเตอร์เหนี่ยวนำคือ 3 เฟสมอเตอร์ ประกอบด้วยขดลวด 3 เฟสเป็นสเตเตอร์ที่มีแม่เหล็กถาวรและโรเตอร์เป็นขดลวดอีก 3 เฟส ทำงานบนหลักการของการหมุนสนามแม่เหล็กนั่นคือการก่อตัวของฟลักซ์แม่เหล็กจากฟลักซ์ขดลวด 3 เฟสซึ่งหมุนรอบแกนทำให้โรเตอร์หมุน มอเตอร์เหนี่ยวนำมีความสามารถในการสตาร์ทด้วยตนเองเนื่องจากการทำงานร่วมกันระหว่างฟลักซ์สนามแม่เหล็กหมุนและฟลักซ์ที่คดเคี้ยวของโรเตอร์ทำให้กระแสโรเตอร์สูงเมื่อแรงบิดเพิ่มขึ้น เป็นผลให้สเตเตอร์ดึงกระแสไฟฟ้าสูงและเมื่อมอเตอร์ถึงความเร็วเต็มที่กระแสไฟฟ้าจำนวนมาก (มากกว่ากระแสไฟฟ้าที่กำหนด) จะถูกดึงออกมาและอาจทำให้มอเตอร์ร้อนขึ้นและทำให้เกิดความเสียหายในที่สุด เพื่อป้องกันปัญหานี้จำเป็นต้องใช้มอเตอร์สตาร์ท

มอเตอร์เหนี่ยวนำ
ความต้องการในการสตาร์ทมอเตอร์
ในมอเตอร์เหนี่ยวนำเมื่อจ่ายให้กับขดลวดสเตเตอร์ฟลักซ์สนามแม่เหล็กหมุนและฟลักซ์ที่เกิดขึ้นในขดลวดโรเตอร์เนื่องจากแรงเคลื่อนไฟฟ้าย้อนกลับทำให้แรงบิดของมอเตอร์เพิ่มขึ้นทำให้เกิดกระแสโรเตอร์สูง ในช่วงเวลาระหว่างการใช้แหล่งจ่ายไฟฟ้ากับมอเตอร์และการเร่งความเร็วจริงของมอเตอร์จนเต็มสเตเตอร์กระแสไฟฟ้าจำนวนมากจะถูกดึงโดยสเตเตอร์จากแหล่งจ่าย กระแสเริ่มต้นนี้มากกว่ากระแสโหลดเต็มประมาณ 5 ถึง 6 เท่า ระยะเวลานี้อาจนานสองสามวินาทีหรือนานกว่านั้น สิ่งนี้ทำให้อุปกรณ์ไฟฟ้าเสียหายเนื่องจากแรงดันไฟฟ้าที่ลดลงในระบบไฟฟ้าที่เพิ่มขึ้นเนื่องจากการไหลของกระแสไฟฟ้าขนาดใหญ่ผ่านสายเคเบิล ด้วยเหตุนี้จึงจำเป็นต้องมีวิธีการสตาร์ทมอเตอร์ที่ชัดเจน
ความหมายของมอเตอร์สตาร์ท
เป็นอุปกรณ์ที่เชื่อมต่อแบบอนุกรมกับมอเตอร์เพื่อลดกระแสเริ่มต้นจากนั้นเพิ่มขึ้นเมื่อมอเตอร์เริ่มหมุนทีละน้อย ประกอบด้วยขั้วต่อที่ทำหน้าที่เป็นสวิตช์เพื่อควบคุมการไหลของกระแสไปยังมอเตอร์และหน่วยโอเวอร์โหลดซึ่งจะวัดการไหลของกระแสผ่านมอเตอร์และควบคุมการหยุดของมอเตอร์ในกรณีที่มีการดึงกระแสไฟฟ้ามาก
หลักการของมอเตอร์สตาร์ท
กระแสไฟฟ้าที่ดึงโดยมอเตอร์สามารถควบคุมได้โดยการลดแรงเคลื่อนไฟฟ้าย้อนกลับ (ทำได้โดยการลดแรงดันไฟฟ้า) หรือโดยการเพิ่มความต้านทานของโรเตอร์ในระหว่างที่มอเตอร์สตาร์ท
ประเภทของมอเตอร์สตาร์ท
ออนไลน์โดยตรง: ประกอบด้วยปุ่มกดธรรมดาเป็นตัวควบคุม เมื่อกดปุ่มสตาร์ทสวิตช์ที่เชื่อมต่อมอเตอร์และแหล่งจ่ายไฟหลักจะปิดและมอเตอร์จะได้รับกระแสไฟฟ้า ในกรณีที่กระแสไฟเกินปุ่มหยุดจะถูกกดและหน้าสัมผัสเสริมบายพาสจะเปิดขึ้น
 สตาร์เดลต้า : ขดลวด 3 เส้นถูกเชื่อมต่อครั้งแรกในการเชื่อมต่อแบบดาวและหลังจากนั้นสักครู่ (ตัดสินใจโดยตัวจับเวลาหรือวงจรควบคุมอื่น ๆ ) ขดลวดจะเชื่อมต่อด้วยการเชื่อมต่อแบบเดลต้า ในการเชื่อมต่อแบบดาวกระแสไฟฟ้าที่ดึงออกมาคือ 0.58% ของกระแสปกติและแรงดันเฟสจะลดลงเหลือ 0.58% ดังนั้นแรงบิดจึงลดลง
สตาร์เดลต้า : ขดลวด 3 เส้นถูกเชื่อมต่อครั้งแรกในการเชื่อมต่อแบบดาวและหลังจากนั้นสักครู่ (ตัดสินใจโดยตัวจับเวลาหรือวงจรควบคุมอื่น ๆ ) ขดลวดจะเชื่อมต่อด้วยการเชื่อมต่อแบบเดลต้า ในการเชื่อมต่อแบบดาวกระแสไฟฟ้าที่ดึงออกมาคือ 0.58% ของกระแสปกติและแรงดันเฟสจะลดลงเหลือ 0.58% ดังนั้นแรงบิดจึงลดลง
 Auto Transformer เริ่มทำงาน : ประกอบด้วยหม้อแปลงไฟฟ้าอัตโนมัติ (หม้อแปลงไฟฟ้าที่มีขดลวดเดี่ยวเคาะที่จุดต่าง ๆ เพื่อจ่ายเปอร์เซ็นต์ของแรงดันไฟฟ้าหลักในการเชื่อมต่อทุติยภูมิ) ในการเชื่อมต่อแบบดาวซึ่งจะช่วยลดแรงดันไฟฟ้าที่ใช้กับขั้วมอเตอร์ ประกอบด้วยขดลวดทุติยภูมิ 3 ตัวที่เชื่อมต่อกับสามเฟส ในช่วงเริ่มต้นหม้อแปลงจะอนุญาตให้ใช้แรงดันไฟฟ้าที่ต่ำกว่ากับขดลวดทั้งสาม
Auto Transformer เริ่มทำงาน : ประกอบด้วยหม้อแปลงไฟฟ้าอัตโนมัติ (หม้อแปลงไฟฟ้าที่มีขดลวดเดี่ยวเคาะที่จุดต่าง ๆ เพื่อจ่ายเปอร์เซ็นต์ของแรงดันไฟฟ้าหลักในการเชื่อมต่อทุติยภูมิ) ในการเชื่อมต่อแบบดาวซึ่งจะช่วยลดแรงดันไฟฟ้าที่ใช้กับขั้วมอเตอร์ ประกอบด้วยขดลวดทุติยภูมิ 3 ตัวที่เชื่อมต่อกับสามเฟส ในช่วงเริ่มต้นหม้อแปลงจะอนุญาตให้ใช้แรงดันไฟฟ้าที่ต่ำกว่ากับขดลวดทั้งสาม

สตาร์ทเตอร์ต้านทานสเตเตอร์ : ประกอบด้วยตัวต้านทานสามตัวในอนุกรมโดยแต่ละเฟสของขดลวดสเตเตอร์ซึ่งทำให้แรงดันไฟฟ้าตกคร่อมตัวต้านทานแต่ละตัวและเป็นผลให้แรงดันไฟฟ้าต่ำถูกนำไปใช้กับแต่ละเฟส

สตาร์ทต้านทานโรเตอร์ : ประกอบด้วยตัวต้านทาน 3 ตัวที่เชื่อมต่อแบบอนุกรมกับขดลวดโรเตอร์ซึ่งจะช่วยลดกระแสของโรเตอร์ แต่จะเพิ่มแรงบิด

การประยุกต์ใช้ Star Delta Starter เพื่อควบคุมการสตาร์ทมอเตอร์เหนี่ยวนำ
สตาร์ทเตอร์แบบสตาร์เดลต้ามีราคาถูกที่สุดในบรรดาสตาร์ทเตอร์ทั้งหมดและเหมาะสำหรับการใช้งานเช่นเครื่องมือกลปั๊มมอเตอร์เจนเนอเรเตอร์เป็นต้น A star-delta starter สามารถใช้ในการสตาร์ทมอเตอร์เหนี่ยวนำโดยใช้รีเลย์ 2 ตัวเป็นตัวเชื่อมต่อและตัวจับเวลาเป็นตัวควบคุม ขั้วต่อ 1 ใช้เพื่อจัดหาแหล่งจ่ายไฟในขณะที่ขั้วต่ออื่นควบคุมการเชื่อมต่อของมอเตอร์ในการเชื่อมต่อแบบสตาร์หรือเดลต้า

มีการใช้หม้อแปลงไพรมารีซึ่งเชื่อมต่อกับแหล่งจ่ายไฟ 3 เฟสและตัวที่สองเชื่อมต่อกับรีเลย์และตัวจับเวลาในลักษณะที่ความล้มเหลวของ 1 เฟสใด ๆ จะหยุดการจ่ายไปยังตัวจับเวลา รีเลย์ทั้งสองตัวใช้ในการทริกเกอร์ตัวจับเวลาซึ่งพัฒนาเอาต์พุตลอจิกสูงที่พิน 3 ดังนั้นจึงเปิดสวิตช์รีเลย์ 4 ทำให้แหล่งจ่ายในการเชื่อมต่อแบบดาวซึ่งให้ความเข้มพลังงานต่ำแก่โหลดโดยแยกโหลดออกจากปกติ 3 การจ่ายเฟสผ่านรีเลย์ 3 (ดำเนินการโดยรีเลย์ทริกเกอร์สองตัว) หลังจากเวลาผ่านไประยะหนึ่งเอาท์พุตของตัวจับเวลา (ทำงานในโหมดโมโนสเตเบิล) จะต่ำลง (เวลาถูกกำหนดโดยการรวม RC ที่พิน 2 และ 6) และรีเลย์ 4 จะปิดลงจึงทำให้แหล่งจ่าย 3 เฟสถูกส่งไปยังมอเตอร์และ มอเตอร์ทำงานในโหมดเดลต้า
ข้อมูลเพิ่มเติมเกี่ยวกับการเริ่มต้นของการเหนี่ยวนำที่กล่าวถึงด้านล่างนี้
การเริ่มต้นอย่างนุ่มนวลของมอเตอร์เหนี่ยวนำโดยการหน่วงเวลาในการลดมุมยิง
Soft Start และ Soft Stop:
ในการเริ่มต้นปกติของ มอเตอร์เหนี่ยวนำ แรงบิดได้รับการพัฒนามากขึ้นซึ่งทำให้ความเค้นถูกถ่ายโอนไปยังระบบเกียร์เชิงกลส่งผลให้ชิ้นส่วนเครื่องจักรกลสึกหรอมากเกินไปและล้มเหลว นอกจากนี้เมื่อความเร่งเพิ่มขึ้นกระแสไฟฟ้าสูงจะถูกดึงออกมาซึ่งประมาณ 600% ของกระแสไฟฟ้าปกติ สิ่งนี้ไม่สามารถแก้ไขได้โดยใช้ star-delta starter
การสตาร์ทแบบนุ่มนวลเป็นทางออกที่เชื่อถือได้และประหยัดสำหรับปัญหาเหล่านี้ด้วยการปล่อยพลังงานที่ควบคุมไปยังมอเตอร์ซึ่งจะช่วยให้การเร่งความเร็วและการชะลอตัวที่ยอดเยี่ยมเป็นไปอย่างราบรื่น ความเสียหายของขดลวดและตลับลูกปืนจะลดลงส่งผลให้อายุการใช้งานของมอเตอร์ยาวนานขึ้น

ด้วยเทคนิคนี้การเริ่มต้นและการหยุดแบบควบคุมจะทำได้ด้วยการเลือกเวลาทางลาดและการตั้งค่าขีด จำกัด ปัจจุบันที่เหมาะสม
- ความเครียดเชิงกลน้อยลง
- ปรับปรุงตัวประกอบกำลัง
- ความต้องการสูงสุดที่ลดลง
- การบำรุงรักษาทางกลน้อยลง
เทคนิคนี้เหมาะสำหรับการใช้งานที่มีแรงบิดชั่วขณะบ่อยๆเช่นในการสูบของเหลวซึ่งอาจทำให้ท่อและข้อต่อแตกได้ในที่สุด
เทคโนโลยีตามมาใน Soft Starter:
ซอฟต์สตาร์ทเป็นประเภทของตัวสตาร์ทแบบลดแรงดันไฟฟ้าสำหรับมอเตอร์เหนี่ยวนำกระแสสลับ ซอฟต์สตาร์ทจะคล้ายกับความต้านทานหลักหรือสตาร์ทเตอร์ของสารตั้งต้นหลักซึ่งอยู่ในอนุกรมกับแหล่งจ่ายให้กับมอเตอร์ กระแสอินพุตไปยังจุดเริ่มต้นเท่ากับกระแสเอาต์พุต ประกอบด้วยอุปกรณ์โซลิดสเตตเพื่อควบคุมการไหลของกระแสและแรงดันไฟฟ้าที่ใช้กับมอเตอร์ ซอฟต์สตาร์ทเตอร์สามารถเชื่อมต่อแบบอนุกรมด้วยแรงดันไฟฟ้าของสายหรือเชื่อมต่อภายในเดลต้าลูป
การควบคุมแรงดันไฟฟ้า:
สวิตช์โซลิดสเตต AC จัดเรียงเป็นอนุกรมโดยมีหนึ่งเฟสขึ้นไปเพื่อให้สามารถควบคุมแรงดันไฟฟ้าได้
การใช้สวิตช์โซลิดสเตต:
1 x Triac ต่อเฟส

1 x SCR และ 1 x ไดโอดย้อนกลับขนานเชื่อมต่อต่อเฟส

2 x SCRs เชื่อมต่อแบบขนานย้อนกลับต่อเฟส

การเปลี่ยนมุมการนำของสวิตช์สามารถควบคุมแรงดันไฟฟ้าเฉลี่ยได้เนื่องจากมุมการนำไฟฟ้าที่เพิ่มขึ้นสามารถเพิ่มแรงดันเอาต์พุตเฉลี่ยได้ กระบวนการนี้พิสูจน์ความได้เปรียบด้วยประสิทธิภาพที่ดีขึ้นและการกระจายพลังงานที่น้อยลง นอกจากนี้แรงดันไฟฟ้าเฉลี่ยสามารถเปลี่ยนแปลงได้อย่างง่ายดายโดยใช้อุปกรณ์อิเล็กทรอนิกส์ควบคุม

เครดิตรูปภาพ:
- มอเตอร์เหนี่ยวนำโดย ย่อย. allaboutcircuits
















{kind=link}