
บทนำ:
ปัจจุบันอุตสาหกรรมจำนวนมากใช้หุ่นยนต์เนื่องจากมีประสิทธิภาพและความน่าเชื่อถือในระดับสูงซึ่งเป็นความช่วยเหลือที่ดีสำหรับมนุษย์ หุ่นยนต์หลีกเลี่ยงสิ่งกีดขวางใช้สำหรับตรวจจับสิ่งกีดขวางและหลีกเลี่ยงการชนกัน นี่คือหุ่นยนต์อิสระ การออกแบบหุ่นยนต์หลีกเลี่ยงสิ่งกีดขวางนั้นจำเป็นต้องมีการรวมเซ็นเซอร์จำนวนมากตามลักษณะงาน
การตรวจจับสิ่งกีดขวางเป็นความต้องการหลักของหุ่นยนต์อิสระนี้ หุ่นยนต์รับข้อมูลจากบริเวณโดยรอบผ่านเซ็นเซอร์ที่ติดตั้งบนหุ่นยนต์ อุปกรณ์ตรวจจับบางอย่างที่ใช้ในการตรวจจับสิ่งกีดขวางเช่นเซ็นเซอร์กระแทกเซ็นเซอร์อินฟราเรดเซ็นเซอร์อัลตราโซนิกเป็นต้นเซ็นเซอร์อัลตราโซนิกเหมาะสมที่สุดสำหรับการตรวจจับสิ่งกีดขวางและมีต้นทุนต่ำและมีความสามารถในการทำงานที่หลากหลาย

ยานยนต์หลีกเลี่ยงอุปสรรค
หลักการทำงาน:
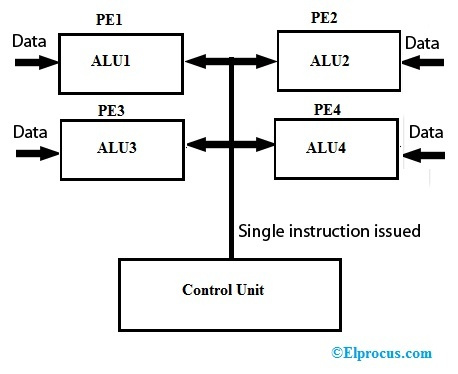
หลีกเลี่ยงอุปสรรค ยานยนต์ ใช้เซ็นเซอร์อัลตราโซนิกสำหรับการเคลื่อนไหว ไมโครคอนโทรลเลอร์ตระกูล 8051 ถูกใช้เพื่อให้ได้การทำงานที่ต้องการ มอเตอร์เชื่อมต่อผ่าน IC ขับมอเตอร์ไปยังไมโครคอนโทรลเลอร์ เซ็นเซอร์อัลตราโซนิกติดอยู่ด้านหน้าของหุ่นยนต์
เมื่อใดก็ตามที่หุ่นยนต์ไปตามเส้นทางที่ต้องการเซ็นเซอร์อัลตราโซนิกจะส่งคลื่นอัลตร้าโซนิคออกจากหัวเซนเซอร์อย่างต่อเนื่อง เมื่อใดก็ตามที่มีสิ่งกีดขวางอยู่ข้างหน้าคลื่นอัลตราโซนิกจะสะท้อนจากวัตถุและข้อมูลนั้นจะถูกส่งไปยังไมโครคอนโทรลเลอร์ ไมโครคอนโทรลเลอร์ควบคุมมอเตอร์ซ้ายขวาหลังด้านหน้าโดยอาศัยสัญญาณอัลตราโซนิก ในการควบคุมความเร็วของการมอดูเลตความกว้างพัลส์ของมอเตอร์แต่ละตัวจะใช้ (PWM)

แผนภาพบล็อกยานยนต์หลีกเลี่ยงอุปสรรค
เซนเซอร์ต่างๆที่ใช้สำหรับการหลีกเลี่ยงสิ่งกีดขวางยานยนต์หุ่นยนต์
1. การตรวจจับสิ่งกีดขวาง (เซ็นเซอร์ IR):
เซ็นเซอร์ IR ใช้สำหรับการตรวจจับสิ่งกีดขวางสัญญาณเอาต์พุตของเซ็นเซอร์จะส่งไปยังไมโครคอนโทรลเลอร์ ไมโครคอนโทรลเลอร์ควบคุมยานพาหนะ (เดินหน้า / ถอยหลัง / หยุด) โดยใช้มอเตอร์กระแสตรงซึ่งติดตั้งอยู่ในรถ หากสิ่งกีดขวางใด ๆ ที่วางไว้ในแนวนอนเซ็นเซอร์ IR ไม่สามารถรับรังสีของแสงและส่งสัญญาณไปยังไมโครคอนโทรลเลอร์ ไมโครคอนโทรลเลอร์จะหยุดรถทันทีและไซเรนจะเปิดขึ้น หลังจากผ่านไปหนึ่งนาทีหุ่นยนต์จะตรวจสอบสถานะเส้นทางหากมีการนำสิ่งกีดขวางออกหุ่นยนต์เคลื่อนที่ไปไกลกว่าเดิมหุ่นยนต์จะกลับไปยังจุดเริ่มต้น เซ็นเซอร์จะตรวจจับวัตถุโดยการปล่อยคลื่นอัลตร้าโซนิคสั้น ๆ จากนั้นจึงฟังเสียงเพื่อสิ่งแวดล้อม ภายใต้การควบคุมของไมโครคอนโทรลเลอร์โฮสต์เซ็นเซอร์จะปล่อยการระเบิดสั้น ๆ 40 kHz การระเบิดนี้เป็นการระเบิดหรือเดินทางผ่านอากาศไปกระทบบทความและหลังจากนั้นจะเด้งไปที่เซ็นเซอร์อีกครั้ง เซ็นเซอร์ให้พัลส์เอาท์พุตไปยังโฮสต์ซึ่งจะยุติเมื่อตรวจพบเสียงสะท้อนดังนั้นความกว้างของพัลส์หนึ่งไปยังอีกอันหนึ่งจะถูกนำไปคำนวณโดยโปรแกรมเพื่อให้ผลลัพธ์เป็นระยะทางของวัตถุ
สอง. การตรวจจับเส้นทาง (พร็อกซิมิตีเซนเซอร์):
สาเหตุปกติเซ็นเซอร์ทั้งสองให้แนวทางและหุ่นยนต์ตามมันตรงไปบนเส้นทาง เมื่อเส้นสิ้นสุดในขณะนั้นหุ่นยนต์จะถอยหลังที่ 180 และหันกลับที่เดิม

กำลังออนไลน์
พร็อกซิมิตีเซ็นเซอร์ใช้สำหรับการตรวจจับเส้นทาง เมื่อตรวจไม่พบเซ็นเซอร์ด้านขวาในเส้นโค้งไมโครคอนโทรลเลอร์จะเปิดใช้งานมอเตอร์ด้านซ้ายเพื่อเลี้ยวซ้ายจนกว่าสัญญาณจากเซ็นเซอร์ด้านขวา เมื่อตรวจพบสัญญาณเซ็นเซอร์ที่ถูกต้องมอเตอร์ทั้งสองตัวจะเปิดใช้งานเพื่อไปข้างหน้า เมื่อเส้นสิ้นสุดในขณะนั้นหุ่นยนต์จะถอยหลังที่ 180 และหันกลับที่เดิม

การสูญเสียเส้น
3. อัลตราโซนิกเซนเซอร์:
เซ็นเซอร์อัลตราโซนิกใช้สำหรับตรวจจับสิ่งกีดขวาง เซ็นเซอร์อัลตราโซนิกจะส่งคลื่นอัลตร้าโซนิคจากหัวเซนเซอร์และรับคลื่นอัลตราโซนิกที่สะท้อนจากวัตถุอีกครั้ง
มีแอปพลิเคชั่นมากมายที่ใช้เซ็นเซอร์อัลตราโซนิกเช่นระบบเตือนภัยที่เปิดประตูอัตโนมัติเป็นต้นเซ็นเซอร์อัลตราโซนิกมีขนาดกะทัดรัดและมีประสิทธิภาพสูงมาก

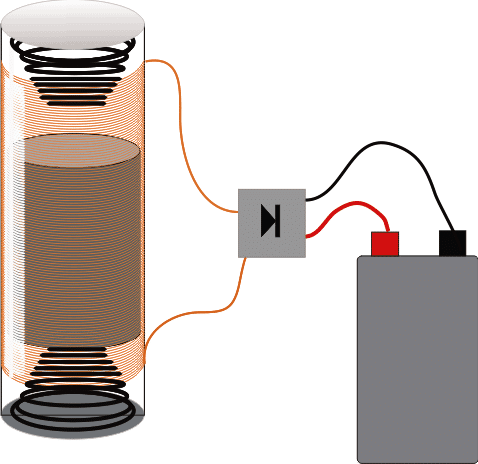
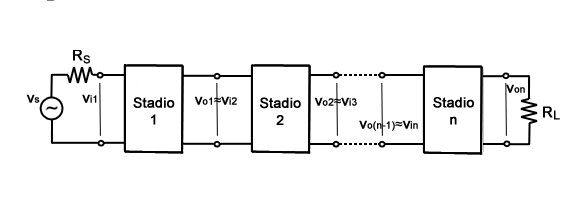
แผนภาพทั่วไปของเซ็นเซอร์อัลตราโซนิก
หลักการทำงาน:
เซ็นเซอร์อัลตราโซนิกจะปล่อยสัญญาณสั้นและความถี่สูง สิ่งเหล่านี้แพร่กระจายไปในอากาศด้วยความเร็วเสียง หากพวกมันชนวัตถุใด ๆ พวกมันจะสะท้อนสัญญาณสะท้อนไปยังเซ็นเซอร์ เซ็นเซอร์อัลตราโซนิกประกอบด้วยมัลติไวเบรเตอร์ยึดติดกับฐาน มัลติไวเบรเตอร์คือการรวมกันของเรโซเนเตอร์และไวเบรเตอร์ เครื่องสะท้อนคลื่นส่งคลื่นอัลตราโซนิกที่เกิดจากการสั่นสะเทือน เซ็นเซอร์อัลตราโซนิกประกอบด้วยสองส่วนคือตัวปล่อยซึ่งสร้างคลื่นเสียง 40 kHz และเครื่องตรวจจับจะตรวจจับคลื่นเสียง 40 kHz และส่งสัญญาณไฟฟ้ากลับไปยังไมโครคอนโทรลเลอร์

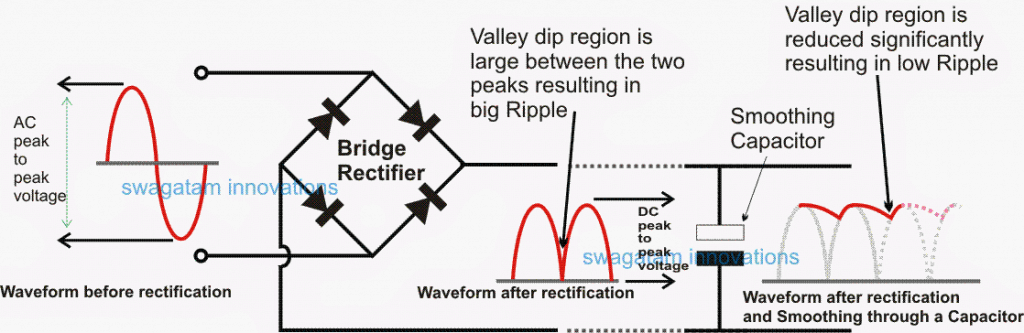
หลักการทำงานของอัลตราโซนิก
เซ็นเซอร์อัลตราโซนิกช่วยให้หุ่นยนต์สามารถมองเห็นและจดจำวัตถุได้อย่างแท้จริงหลีกเลี่ยงสิ่งกีดขวางวัดระยะทาง ช่วงการทำงานของเซ็นเซอร์อัลตราโซนิกคือ 10 ซม. ถึง 30 ซม.
การทำงานของเซ็นเซอร์อัลตราโซนิก:
เมื่อพัลส์ไฟฟ้าของแรงดันไฟฟ้าสูงถูกนำไปใช้กับตัวแปลงสัญญาณอัลตราโซนิกมันจะสั่นสะเทือนในสเปกตรัมความถี่เฉพาะและสร้างคลื่นเสียงออกมา เมื่อใดก็ตามที่มีสิ่งกีดขวางข้างหน้าเซ็นเซอร์อัลตราโซนิกคลื่นเสียงจะสะท้อนในรูปแบบของเสียงสะท้อนและสร้างพัลส์ไฟฟ้า จะคำนวณเวลาที่ใช้ระหว่างการส่งคลื่นเสียงและการรับเสียงสะท้อน รูปแบบเสียงสะท้อนจะถูกเปรียบเทียบกับรูปแบบของคลื่นเสียงเพื่อกำหนดสภาพของสัญญาณที่ตรวจพบ
บันทึก: เครื่องรับอัลตราโซนิกจะต้องตรวจจับสัญญาณจากเครื่องส่งอัลตราโซนิกในขณะที่คลื่นส่งกระทบกับวัตถุ การรวมกันของเซ็นเซอร์ทั้งสองนี้จะช่วยให้หุ่นยนต์ตรวจจับวัตถุในเส้นทางของมันได้ เซ็นเซอร์อัลตราโซนิกติดอยู่ด้านหน้าของหุ่นยนต์และเซ็นเซอร์ดังกล่าวจะช่วยให้หุ่นยนต์นำทางผ่านห้องโถงของอาคารใด ๆ
การใช้อัลตราโซนิกเซนเซอร์:
- เปลี่ยนสัญญาณจราจรอัตโนมัติ
- ระบบเตือนภัยผู้บุกรุก
- การเข้าถึงเครื่องมือนับสวิตช์มิเตอร์จอดรถ
- โซนาร์ด้านหลังของรถยนต์
คุณสมบัติของเซ็นเซอร์อัลตราโซนิก:
- กะทัดรัดและน้ำหนักเบา
- ความไวสูงและแรงดันสูง
- ความน่าเชื่อถือสูง
- การใช้พลังงาน 20mA
- การสื่อสารแบบพัลส์เข้า / ออก
- มุมรับแคบ
- ให้การประมาณค่าการแยกที่แน่นอนและไม่สัมผัสภายใน 2 ซม. ถึง 3 ม
- ไฟ LED แสดงจุดระเบิดแสดงการประมาณค่าล่วงหน้า
- ส่วนหัว 3 พินทำให้การเชื่อมต่อเป็นเรื่องง่ายโดยใช้ลิงค์การพัฒนาเซอร์โว
การประยุกต์ใช้หุ่นยนต์หลีกเลี่ยงอุปสรรค:
- โดยเฉพาะการใช้งานทางทหาร
- สามารถใช้สำหรับสงครามในเมือง
ตอนนี้มีความคิดอย่างชัดเจนเกี่ยวกับแนวคิดของยานยนต์โดยใช้เซ็นเซอร์อัลตราโซนิกในการตรวจจับสิ่งกีดขวางหากมีข้อสงสัยเพิ่มเติมเกี่ยวกับหัวข้อนี้หรือแนวคิดของโครงการไฟฟ้าและอิเล็กทรอนิกส์แสดงความคิดเห็นด้านล่าง
เครดิตภาพ:
- แผนภาพทั่วไปของเซ็นเซอร์อัลตราโซนิกโดย Letsmakerobots
- หลักการทำงานของเซ็นเซอร์อัลตราโซนิกโดย ไมโครโซนิค






{kind=link}