เรารู้ว่ามี มอเตอร์ไฟฟ้า ใช้ประโยชน์จากหลักการพื้นฐานทางไฟฟ้ารวมทั้งแม่เหล็กไฟฟ้าเพื่อสร้างการเคลื่อนที่เชิงกล มี มอเตอร์ชนิดต่างๆ มีอยู่ในตลาด แต่การพิจารณาว่ามอเตอร์เหล่านี้ใช้งานได้ยากหรือตัวใดเหมาะกับการใช้งานของคุณ มอเตอร์ซิงโครนัสเป็นมอเตอร์ชนิดหนึ่งนอกเหนือจากนี้มอเตอร์ที่ทำงานโดยขึ้นอยู่กับความไม่เต็มใจที่เรียกว่ามอเตอร์แบบไม่เต็มใจ มอเตอร์นี้มีสองส่วนที่สำคัญคือสเตเตอร์และโรเตอร์ บทความนี้กล่าวถึงภาพรวมของมอเตอร์แบบไม่เต็มใจ
Reluctance Motor คืออะไร?
คำจำกัดความ: นี่คือมอเตอร์ขั้นสูงชนิดหนึ่งซึ่งมีทั้งสองอย่าง สเตเตอร์ และโรเตอร์คล้ายกับมอเตอร์ไฟฟ้าทั่วไป มอเตอร์เหล่านี้ทำงานร่วมกับสนามแม่เหล็กหมุน (RPM) ที่แม่นยำโดยซิงโครไนซ์ความเร็วของโรเตอร์โดยใช้ RMF ของสเตเตอร์ ความหนาแน่นของกำลังไฟฟ้าที่ส่งมอบโดยมอเตอร์เหล่านี้มีราคาสูงในราคาที่ต่ำเพื่อให้น่าสนใจในการใช้งานที่หลากหลาย หลักการทำงานของมอเตอร์แบบไม่เต็มใจ คือเมื่อใดก็ตามที่วัสดุแม่เหล็กตั้งอยู่ภายในสนามแม่เหล็กก็จะนำเข้าสู่แนวเดียวกันเสมอโดยไม่เต็มใจ

มอเตอร์แบบไม่เต็มใจ
ข้อกำหนดของมอเตอร์ฝืน เป็นประเภทของเฟสอัตราส่วนขั้วของสเตเตอร์ถึง โรเตอร์ พิกัดกำลังหรือแรงบิดระลอกแรงบิดและช่วงความเร็วแรงบิดคงที่ ตัวประกอบกำลังของมอเตอร์แบบไม่เต็มใจ PF ล้าหลังและประสิทธิภาพของเครื่องอยู่ในช่วง 55 ถึง 75%
การก่อสร้าง Reluctance Motor
โครงสร้างของมอเตอร์นี้แสดงไว้ด้านล่าง การออกแบบสามารถทำได้โดยการถอดฟันออกในสี่ตำแหน่งเพื่อสร้างโครงสร้างสี่เสา
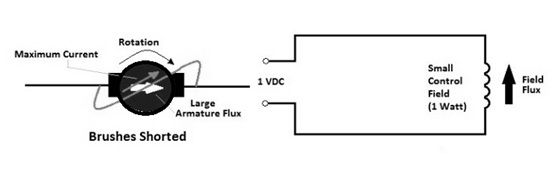
วงแหวนที่ปลายทั้งสองด้านลัดวงจร เมื่อสเตเตอร์ของมอเตอร์อยู่ในแนวเดียวกับแหล่งจ่ายไฟเฟสเดียวมอเตอร์จะทำงานเหมือน มอเตอร์เหนี่ยวนำเฟสเดียว . เมื่อความเร็วของมอเตอร์ถึงระดับสูงสุดของความเร็วซิงโครนัสสวิตช์แรงเหวี่ยงจะถอดขดลวดเสริมออก มอเตอร์จะเพิ่มความเร็วเหมือนมอเตอร์เฟสเดียวผ่านขดลวดหลักในกระบวนการ

การก่อสร้างมอเตอร์แบบไม่เต็มใจ
แรงบิดของมอเตอร์นี้สามารถสร้างขึ้นได้เนื่องจากโรเตอร์มีแนวโน้มที่จะเชื่อมต่อตัวเองในตำแหน่งที่ไม่เต็มใจน้อยที่สุดเมื่อความเร็วของมอเตอร์เข้าใกล้ความเร็วซิงโครนัสมากขึ้น ดังนั้นโรเตอร์จึงลากแบบซิงโครไนซ์ ความเฉื่อยของโหลดต้องอยู่ในขีด จำกัด เพื่อประสิทธิภาพที่เหมาะสม ในการซิงโครไนซ์แรงบิดของการเหนี่ยวนำจะหายไปยกเว้นโรเตอร์ยังคงอยู่ในการซิงโครไนซ์เนื่องจากแรงบิดในการซิงโครนัสไม่เต็มใจ
การทำงานของ Reluctance Motor
ชิ้นส่วนที่สำคัญของมอเตอร์นี้คือสเตเตอร์และโรเตอร์ สองชิ้นนี้เป็นชิ้นส่วนที่อยู่กับที่ซึ่งแยกออกจากช่องว่างของอากาศ โครงสร้างมอเตอร์จะเปลี่ยนไปตามประเภทของมอเตอร์ แต่หลักการทำงานพื้นฐานจะเหมือนกัน ส่วนที่อยู่กับที่เช่นสเตเตอร์รวมถึงเสาคู่ที่เด่นซึ่งสามารถเกิดขึ้นได้จากกระแสไฟฟ้าที่ไหลโดยใช้ลวด โรเตอร์สามารถขึ้นรูปด้วยโลหะแม่เหล็กไฟฟ้าและมีเสาของตัวเอง
ขั้วเหล่านี้เป็นไปตามโครงร่างของสนามแม่เหล็กของสเตเตอร์ เมื่อขั้วเด่นของโรเตอร์เชื่อมต่อกับเสาเด่นของสเตเตอร์แล้วโรเตอร์จะอยู่ในตำแหน่งที่ไม่เต็มใจน้อยที่สุด ดังนั้นจำนวนความต้านทานแม่เหล็กจึงน้อยลงในตอนท้าย เมื่อขั้วสเตเตอร์เชื่อมต่อกับช่องหรือรอยบากของโรเตอร์โรเตอร์จะอยู่ในตำแหน่งที่ไม่เต็มใจสูงสุด เนื่องจากการป้องกันพลังงานโรเตอร์จะเคลื่อนที่ไปยังตำแหน่งที่ไม่เต็มใจน้อยที่สุด ดังนั้นเมื่อโรเตอร์ไม่ได้จัดตำแหน่งจนสุดก็สามารถสร้างแรงบิดแบบไม่เต็มใจได้ แรงบิดนี้จะลากโรเตอร์เข้าหาเสาสเตเตอร์ที่อยู่ติดกันเพื่อทำให้เกิดการหมุน
สมการแรงบิดของมอเตอร์แบบไม่เต็มใจ
แรงบิดที่ไม่สามารถเกิดขึ้นได้เมื่อวัตถุแม่เหล็กไฟฟ้าอยู่ภายในสนามแม่เหล็กภายนอกจากนั้นวัตถุจะเรียงตัวกันผ่านสนามแม่เหล็กภายนอก สิ่งนี้จะทำให้เกิดสนามแม่เหล็กภายในวัตถุเนื่องจากแรงบิดที่สร้างขึ้น
แรงบิดนี้สามารถสร้างขึ้นได้ระหว่างสองสนามซึ่งทำให้วัตถุหมุนวนในพื้นที่ของเส้นผ่านสนามแม่เหล็ก ดังนั้นแรงบิดจึงถูกใช้กับวัตถุเพื่อให้เกิดความไม่เต็มใจน้อยลงสำหรับฟลักซ์แม่เหล็ก แรงบิดของมอเตอร์นี้เรียกอีกอย่างว่าแรงบิด Saliency เนื่องจากความสามารถในการทำงานของเครื่อง มอเตอร์นี้ส่วนใหญ่ขึ้นอยู่กับแรงบิดที่ไม่เต็มใจในการทำงาน ดังนั้นจึงสามารถคำนวณแรงบิดนี้ได้โดยใช้สูตรต่อไปนี้
จากสมการข้างต้น 'V' คือแรงดันไฟฟ้าที่ใช้ 'f' คือความถี่ของเส้นมุมทอร์ก 𝛿rel และ 'K' คือค่าคงที่ของมอเตอร์ การพัฒนาแรงบิดสามารถทำได้ภายในมอเตอร์เนื่องจากความไม่เต็มใจที่เปลี่ยนไป
ประเภทของ Reluctance Motor
มอเตอร์แบบฝืนถูกแบ่งออกเป็นประเภทต่างๆเช่นซิงโครนัสและสวิทช์
มอเตอร์แบบซิงโครนัสรีดักแตนซ์
มอเตอร์เหล่านี้ทำงานอย่างแม่นยำด้วยความเร็วซิงโครนัสและสามารถทำได้ด้วยความช่วยเหลือของขดลวดสเตเตอร์สามเฟสเช่นเดียวกับโรเตอร์เพื่อใช้เสาโรเตอร์ที่โดดเด่นและผนังฟลักซ์แม่เหล็กด้านใน โรเตอร์มักจะเรียกใช้กรงกระรอกที่ดัดแปลงในพื้นที่ของเสาเด่นเพื่อให้มันช่วยจากผลของการเหนี่ยวนำเพื่อเปลี่ยนเป็นการเริ่มต้นด้วยตนเอง เมื่อมอเตอร์ทำงานมันจะถูกเคลื่อนเข้าใกล้ความเร็วซิงโครนัสผ่านการเหนี่ยวนำหลังจากนั้นจะล็อคเข้าสู่การซิงโครไนซ์ผ่านแรงบิดแบบไม่เต็มใจซึ่งสร้างขึ้นจากอุปสรรคของฟลักซ์โรเตอร์
เปลี่ยนมอเตอร์แบบไม่เต็มใจ
การเปลี่ยนมอเตอร์แบบไม่เต็มใจเป็นประเภทหนึ่ง มอเตอร์สเต็ป รวมถึงเสาบางส่วน การสร้างมอเตอร์นี้มีต้นทุนน้อยกว่าเมื่อเทียบกับมอเตอร์ไฟฟ้าเนื่องจากโครงสร้างที่เรียบง่าย มอเตอร์เหล่านี้ส่วนใหญ่จะใช้ในกรณีที่โรเตอร์ไม่ได้ใช้งานเป็นเวลานานในสภาพแวดล้อมที่มีการระเบิดเช่นการขุดเนื่องจากทำงานโดยไม่มีตัวสับเปลี่ยนเชิงกล ขดลวดเฟสมอเตอร์เหล่านี้แยกกันด้วยไฟฟ้าและส่งผลให้ความทนทานต่อความผิดพลาดสูงขึ้นเมื่อเทียบกับมอเตอร์เหนี่ยวนำกระแสสลับที่ขับเคลื่อนด้วยอินเวอร์เตอร์
ข้อดี
ข้อดีของมอเตอร์แบบไม่เต็มใจ รวมสิ่งต่อไปนี้
- ไม่ต้องใช้แหล่งจ่ายไฟ DC
- ลักษณะที่มั่นคง
- การบำรุงรักษาน้อยลง
- ความร้อนน้อยลง
- ไม่มีแม่เหล็ก
- ควบคุมความเร็ว
ข้อเสีย
ข้อเสียของมอเตอร์แบบไม่เต็มใจ รวมสิ่งต่อไปนี้
- ประสิทธิภาพจะน้อยลง
- ตัวประกอบกำลัง น่าสงสาร
- การควบคุมความถี่
- ความจุของมอเตอร์เหล่านี้มีน้อยกว่าในการขับเคลื่อนโหลด
- ต้องใช้โรเตอร์ความเฉื่อยน้อยลง
การใช้งาน
การใช้งานมอเตอร์แบบไม่เต็มใจ รวมสิ่งต่อไปนี้
- อุปกรณ์ส่งสัญญาณ
- อุปกรณ์ควบคุม
- หน่วยงานกำกับดูแลอัตโนมัติ
- อุปกรณ์บันทึก
- นาฬิกา
- เครื่องพิมพ์ Tele
- Gramophones
- มิเตอร์ไฟฟ้าอนาล็อก
- ยานยนต์ไฟฟ้า
- เครื่องมือไฟฟ้าเช่นเครื่องกลึงสว่านเลื่อยสายพานและแท่นพิมพ์
ดังนั้นทั้งหมดนี้เป็นข้อมูลเกี่ยวกับ ภาพรวมของมอเตอร์แบบไม่เต็มใจ , การก่อสร้าง, การทำงาน, ประเภทและการใช้งาน นี่คือมอเตอร์ไฟฟ้าแบบซิงโครนัสและแรงบิดของมอเตอร์นี้อาจเกิดขึ้นได้เนื่องจากการนำแม่เหล็กผ่านพื้นที่สี่เหลี่ยมจัตุรัสและแกนโดยตรงของโรเตอร์ มอเตอร์นี้ไม่มีแม่เหล็กถาวรและขดลวดสนาม นี่คือคำถามสำหรับคุณอะไรคือข้อ จำกัด ของมอเตอร์แบบไม่เต็มใจ?